Product presentation
MiR500 top cover
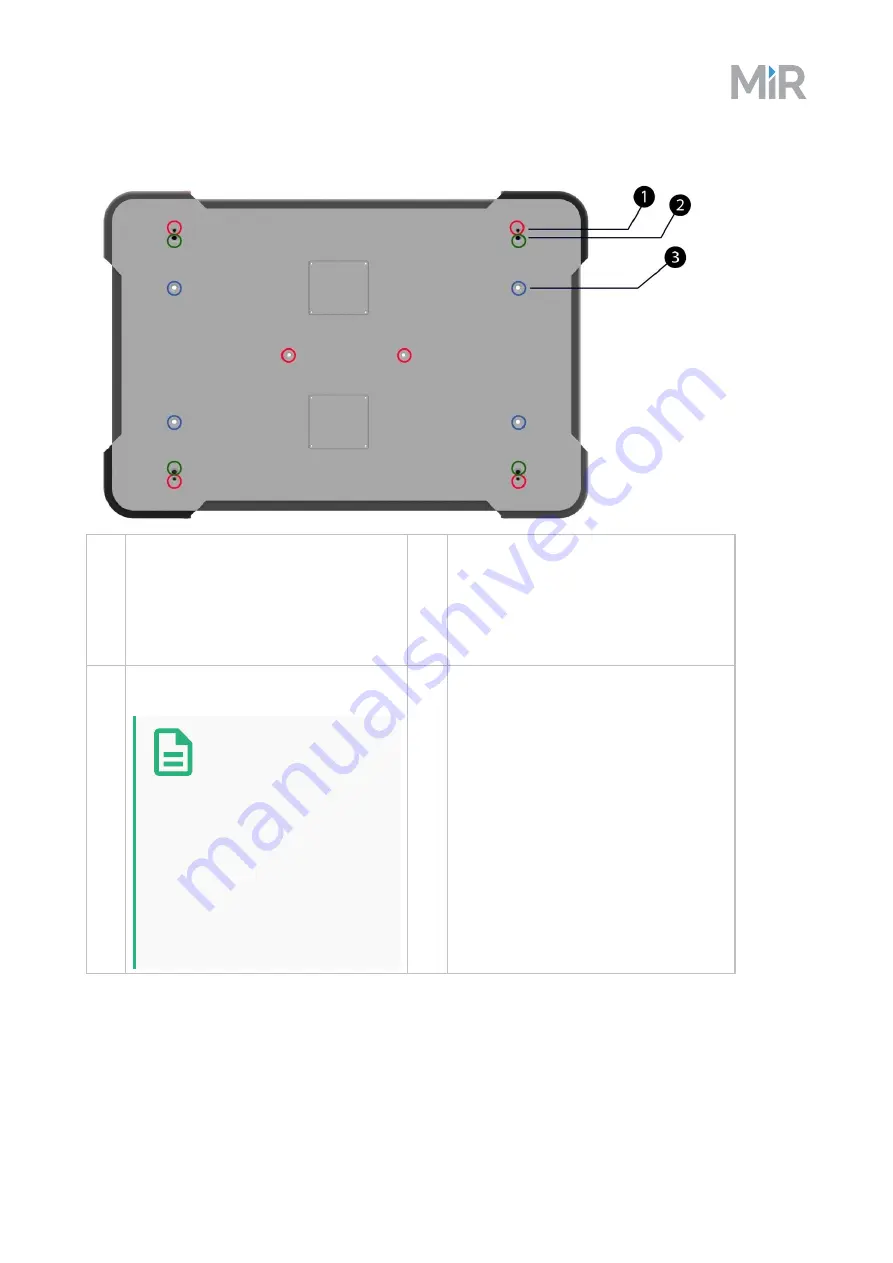
View of MiR500 from the top:
1.
Not accessible; used for fixation of the
top cover.
3.
M10 mooring holes for fixation of top
module, e.g. MiR500 EU Pallet Lift or
MiR500 Lift.
Fore more information on mounting top
modules, see
.
2.
M12 lifting holes; one in each corner used
for fixation of transportation eye bolts.
Note
M12 lifting holes can
also be used to mount
top modules. If a top
module is mounted
using these holes, it is
necessary to drill M12
lifting holes in the top
application in order to lift
the robot.
MiR500 user guide, 2019/03, rev.1.1
42