





























9
Detailed Explanation of Functions
9-93 Vision Sensor Dedicated Commands and Status Variables
Example: Handling of vision sensor information on two multi-mechanism mode
<J96> and <R98> are specified as the <Start cell> and <End cell>.
When "1' is specified as the type with the NVPST command, it is stored in M_NVS1(30,10) as
follows.
Column
Row 1 2 3 4
5
6 7 8 9
1 347.147 -20.232
-158.198
97.641 0.0 110.141 120.141 72.645 97.641
2 381.288 49.018 10.846 97.048 0.0 89.582 99.582 -118.311
97.048
3 310.81 43.65 -34.312 0.0
0.0 139.151 149.151 -163.469
95.793
4 0.0
0.0
0.0
0.0
0.0 0.0 0.0 0.0 0.0
M_NVS1(
)
5 0.0
0.0
0.0
0.0
0.0 0.0 0.0 0.0 0.0
8) Up to three robots can control the same vision sensor at the same time, but this command can not be
used by more than one robot at the same time. Use this command on any one of the robots.
【
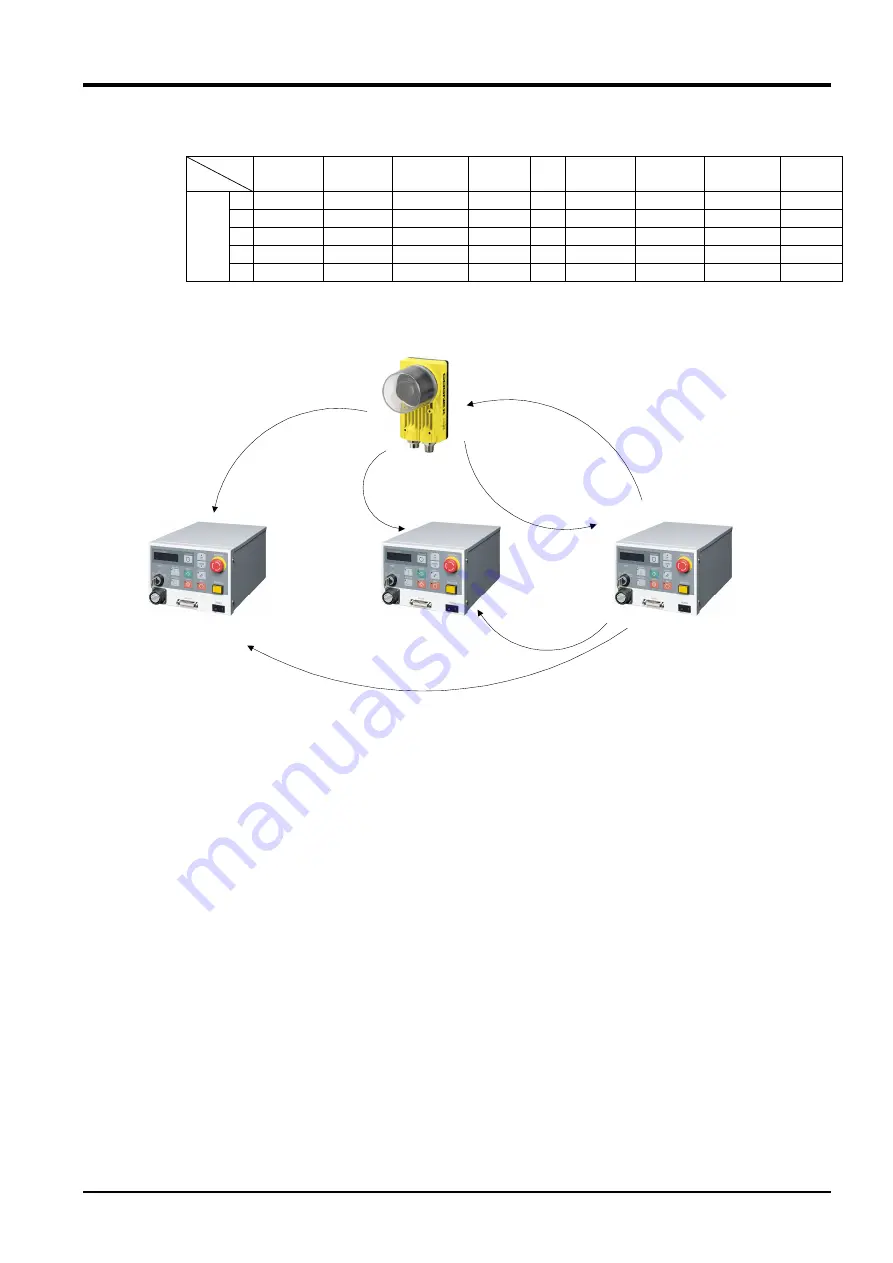
Example of tracking system with three robots and one vision sensor
】
Controller
Controller
Controller(master)
①Image capture request
③Data reception
②Reception enabled notice
③Data reception
③Data reception
②Reception enabled notice
<Procedure>
①
Of the three robots, one is set as the master and the controller (master) outputs the "image capture
request" to the vision sensor with the NVPST command. The vision sensor starts the image capture and
when it is complete, returns that to the controller (master).
②
The controller (master) outputs the "reception enabled notice" to the other two robots. (Taking cost
and degree of difficulty into account, we recommend to connect between robots with I/O. The other
robots are connected with Ethernet, so interactive notification with text string transmission/reception is
possible.)
③
The respective robots receive the information they respectively require with NVIN commands.





















































