





















2-25
Options
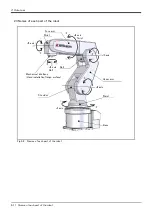
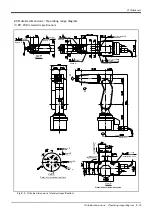
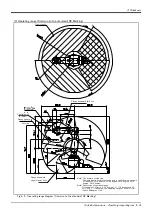
2 Robot arm
■ Cable configuration
The configuration of the flexible cable is shown in
. Refer to this table when selecting the cable bare.
Table 2-6 : Cable configuration
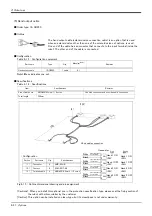
■ Fixing the flexible cable
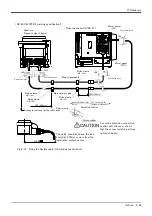
(1) Connect the connector to the robot arm .
(2) Wind the silicon rubber around the cable at a position 300 to 400 mm from the side of robot arm and exten
-
sion section as shown in
, and fix with the nylon clamp to protect the cable from exter
-
nal stress.
Fig.2-11 : Fixing the flexible cable (standard specification)
Item
Motor signal cable
1S- □□ LCBL(S)-11
Motor power cable
1D- □□ LCBL(P)-11
No. of cores
AWG#24(0.2mm
2
)-4P
AWG#24(0.2mm
2
)-7P
AWG#18(0.75mm
2
)
AWG#16(1.25mm
2
)-4C
AWG#18(0.75mm
2
)-4C
Finish dimensions
Approx. φ6mm
Approx. φ8.5mm
Approx. φ1.7mm
Approx. φ8.9mm
Approx. φ6.5mm
No.of cables used
5 cables
1 cable
1 cable
2 cable
8 cable
No. in total
7 cables
10 cables
CN1
CN2
ロボット本体
(ベース部背面)
コントローラ (背面)
モータパワー
モータ信号
(CN2)
モータ信号ケーブル
モータパワーケーブル
(CN1)
CN2
CN1
接続リング部
(固定)
接続リング部
(固定)
ラッチ
(固定用 左右)
ラッチ
(固定用 左右)
ナイロンクランプ
NK-18N
ナイロンクランプ
NK-14N
シリコンゴム
ナイロンクランプ
300~400mm
ロボット本体コネクタ面
ドライブユニットコネクタ面
300~400mm
ナイロンクランプ
NK-18N
ナイロンクランプ
NK-14N
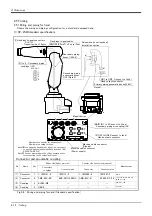
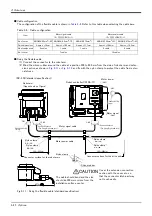
Robot controller CR1DA-771
Motor power cable
Nylon clamp
Nylon clamp
Nylon clamp
Nylon clamp
Nylon clamp
Silicon rubber
Motor power
Motor signal
Robot arm
(Opposite side of figure)
Connection ring
(fixing)
Connection latch
(For fixing. Right and left )
Connection latch
(For fixing. Right and left )
Motor signal cable
Connection ring
(fixing)
Connector surface for the robot arms
Connector surface for the drive unit
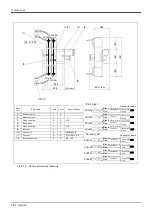
<RV-2SD(standard specification)>
The cable should bend and the size
should be 300mm or more from the
installation surface center.
min
CAUTION
Cover the extension connection
section with the cover etc. so
that the connector latch part may
not touch easily.































































