





























8I20 21
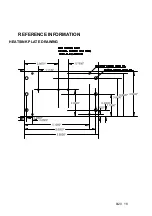
REFERENCE INFORMATION
LBP
LOCAL LBP COMMANDS
In addition to the basic data access commands, there are a set of commands that
access LBP status and control the operation of LBP itself. These are organized as READ
and WRITE commands
LOCAL LBP READ COMMANDS
(HEX), all of these commands return a single byte of data.
0xC0 Get unit address
0xC1 Get LBP status
LBP Status bit definitions:
BIT 7 Reserved
BIT 6 Command Timeout Error
BIT 5 Invalid write Error (attempted write to protected area)
BIT 4 Buffer overflow error
BIT 3 Watchdog timeout error
BIT 2 Reserved
BIT 1 Reserved
BIT 0 CRC error
0xC2 Get CRC enable status (note CRCs are always enabled on the 8I20)
0xC3 Get CRC error count
0xC4 .. 0xC9 Reserved
0xCA Get Enable_RPCMEM access flag
0xCB Get Command timeout (character times/10 for serial)
0xCC .. 0xCF Reserved
0xD0 .. 0xD3 4 character card name







































































