





























Quattro DC Logic Outputs C3 Submenu
81
Logic Outputs C3 submenu
LOGIC OUTPUT x
(Logic Outputs 1-4)
This parameter defines the function of the logic
outputs.
NOTE: The
current
setting of each parameter
is displayed in all caps; all other choices in the
list are displayed in lower case.
RELAY COIL x
(Relay Logic Outputs 1-2)
This parameter defines the function of the
relay logic outputs.
NOTE: The
current
setting of each parameter
is displayed in all caps; all other choices in the
list are displayed in lower case.
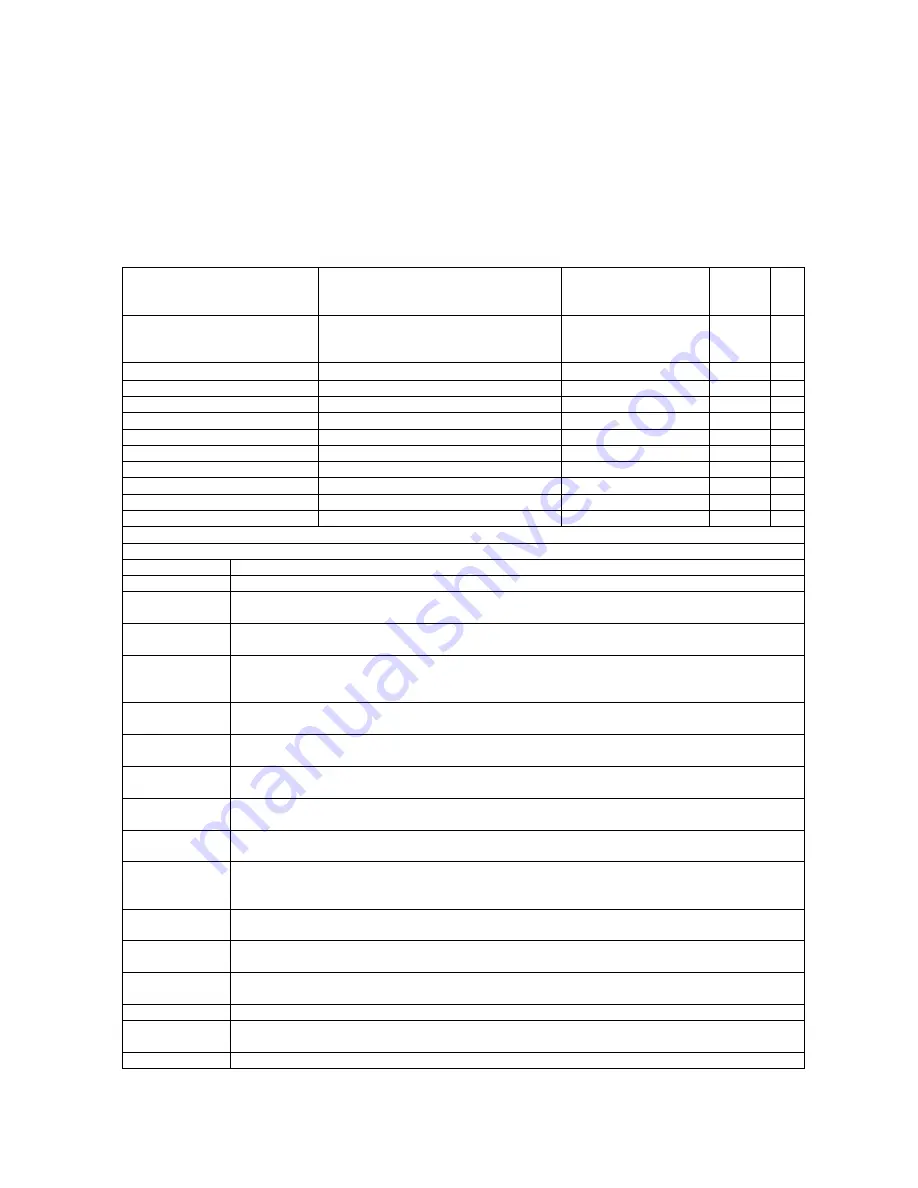
Parameter
Description
Defaults
Hidden
Item
Run
lock
out
LOGIC OUTPUT 1 (TB1-25)
logic output #1
note: drive comes pre-wired for logic
output #1 to be CLOSE CONTACT
CLOSE CONTACT
Y
N
LOGIC OUTPUT 2 (TB1-26)
logic output #2
RUN COMMANDED
Y
N
LOGIC OUTPUT 3 (TB1-27)
logic output #3
MTR OVERLOAD
Y
N
LOGIC OUTPUT 4 (TB1-28)
logic output #4
ENCODER FLT
Y
N
LOGIC OUTPUT 5 (TB1-29)
logic output #5
FAULT
Y
N
LOGIC OUTPUT 6 (TB1-30)
logic output #6
SPEED REG RLS
Y
N
LOGIC OUTPUT 7 (TB1-31)
logic output #7
SPEED REG RLS
Y
N
SSR1(TB1-21/22)
solid state relay #1
NO FUNCTION
Y
N
SSR2 (TB1-23/24)
solid state relay #2
NO FUNCTION
Y
N
RELAY COIL 1 (TB1-1/3/5)
relay coil #1
NO FUNCTION
Y
N
RELAY COIL 2 (TB1-8/10/12)
relay coil #2
NO FUNCTION
Y
N
choices
alarm
(Alarm) The output is true when an alarm is declared by the drive.
alarm+flt
(Alarm and/or Fault) The output is true when a fault and/or an alarm is declared by the drive.
auto brake
(Auto Brake) The output is controlled by the Auto Brake function and is used to open the
mechanical brake. (only multi-step speed commands)
b. ena status
(Base Enable Status) The output will be true when the contact for Base Block Input on TB2-7
and TB2-14 is closed. The output is false when the contact is open.
brake hold
(Brake Hold) The output is true when the brake pick confirmation is received. It is used to
show the mechanical brake is remaining open. This function is used with brakes that need to
have less than 100% voltage to hold the brake open.
brake pick
(Brake Pick) The output is true when the speed regulator is released and is used to open the
mechanical brake.
brk hold flt
(Brake Hold Fault) The output is true when the brake hold command and the brake feedback
do not match for the user specified time.
brk pick flt
(
Brake Pick Fault) The output is true when the brake pick command and the brake feedback do
not match for the user specified time.
car going dwn
(Car Going Down) The output is true when the motor moves in negative direction faster than
the user specified speed
.
car going up
(Car Going Up) The output is true when motor moves in positive direction faster than user
specified speed.
charge fault
(Charging Fault)
The output is true when the DC bus voltage has not stabilized above the voltage fault level or
the charge contactor has not closed after charging.
close contact
(Close Motor Contactor) The output is true when the run command is given, the drive is
enabled, the software has initialized, and no faults are present.
contactor flt
(Contactor Fault) The output is true when the command to close the contactor and the
contactor feedback do not match before the user specified time.
curr reg flt
(Current Regulator Fault) The output is true when the actual current measurement does not
match commanded current.
drv overload
(Drive Overload) The output is true when the drive has exceeded the drive overload curve.
encoder flt
(Encoder Fault) The output is true when the encoder is disconnected or not functioning, while
attempting to run
fault
(Fault) The output is true when a fault is declared by the drive.
Summary of Contents for Quattro DC
Page 161: ...Appendix Input Voltage Requirements 159 Figure 41 300A Application Guide...
Page 177: ......







































































