





























MC80F0104/0204
Preliminary
60
Mar. 2005 Ver 0.2
13.6 PWM Mode
TheMC80F0104/0204 has high speed PWM (Pulse Width
Modulation) functions which shared with Timer1 or
Timer3.
In PWM mode, R10 / PWM1O or R11 / PWM3O pin out-
put up to a 10-bit resolution PWM output. These pins
should be configured as a PWM output by setting "1" bit
PWM1OE and PWM3OE in PSR0 register.
The period of the PWM1 output is determined by the
T1PPR (T1 PWM Period Register) and T1PWHR[3:2]
(bit3,2 of T1 PWM High Register) and the duty of the
PWM output is determined by the T1PDR (T1 PWM Duty
Register) and T3PWHR[1:0] (bit1,0 of T1 PWM High
Register).
The period of the PWM3 output is determined by the
T3PPR (T3 PWM Period Register) and T3PWHR[3:2]
(bit3,2 of T3 PWM High Register) and the duty of the
PWM output is determined by the T3PDR (T3 PWM Duty
Register) and T3PWHR[1:0] (bit1,0 of T3 PWM High
Register).
The user writes the lower 8-bit period value to the
T1(3)PPR( and the higher 2-bit period value to the
T1(3)PWHR[3:2]. And writes duty value to the T1(3)PDR
and the T1(3)PWHR[1:0] same way.
The T1(3)PDR is configured as a double buffering for
glitchless PWM output. In Figure 13-18 , the duty data is
transferred from the master to the slave when the period
data matched to the counted value. (i.e. at the beginning of
next duty cycle)
PWM1(3) Period = [PWM1(3)HR[3:2]T(2)3PPR] X
Source Clock
PWM1(3) Duty = [PWM3HR[1:0]T3PDR] X Source
Clock
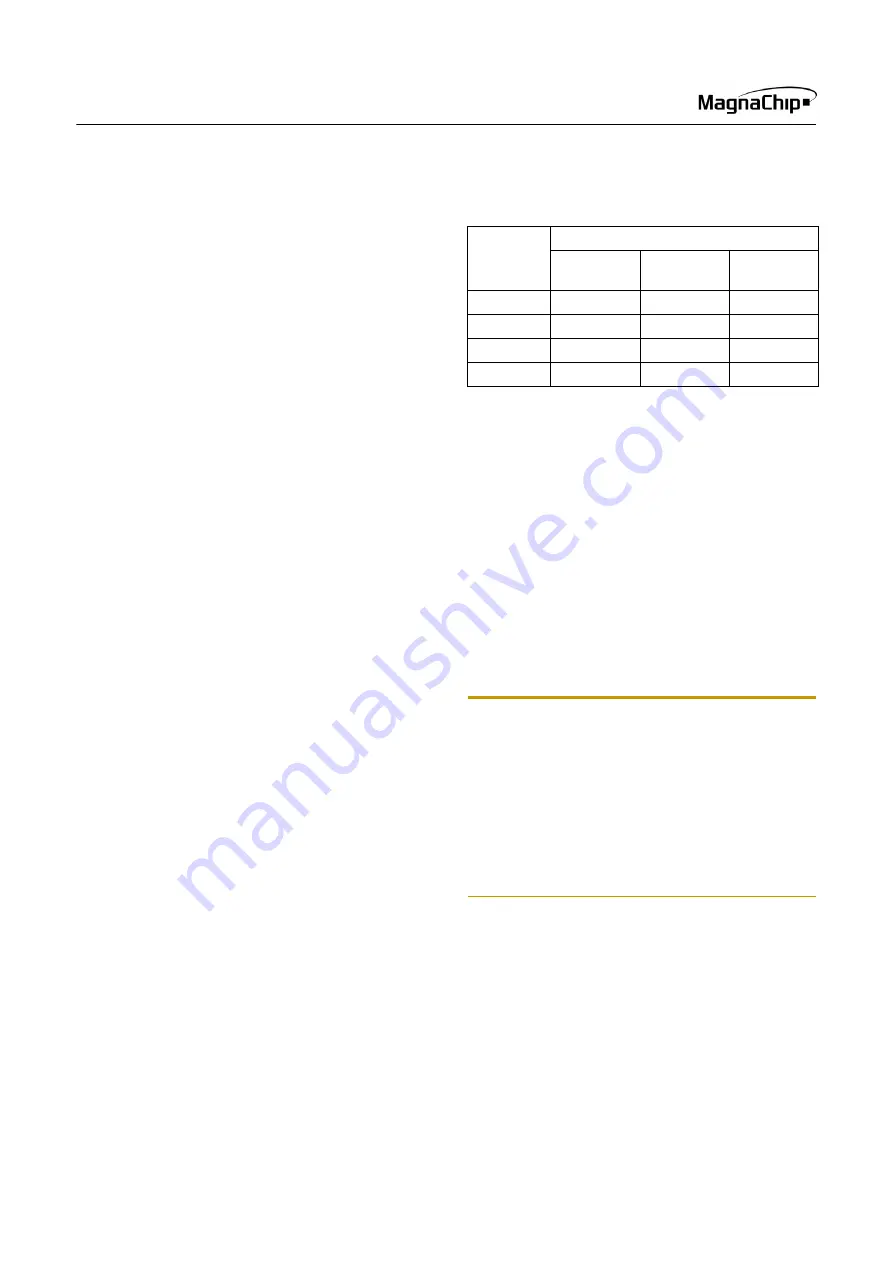
The relation of frequency and resolution is in inverse pro-
portion. Table 13-3 shows the relation of PWM frequency
vs. resolution.
If it needed more higher frequency of PWM, it should be
reduced resolution.
The bit POL of TM1 or TM3 decides the polarity of duty
cycle.
If the duty value is set same to the period value, the PWM
output is determined by the bit POL (1: High, 0: Low). And
if the duty value is set to "00
H
", the PWM output is deter-
mined by the bit POL (1: Low, 0: High).
It can be changed duty value when the PWM output. How-
ever the changed duty value is output after the current pe-
riod is over. And it can be maintained the duty value at
present output when changed only period value shown as
Figure 13-20 . As it were, the absolute duty time is not
changed in varying frequency. But the changed period val-
ue must greater than the duty value.
Note:
If changing the Timer1 to PWM function, it should be stop
the timer clock firstly, and then set period and duty register value.
If user writes register values while timer is in operation, these reg-
ister could be set with certain values.
Ex) Sample Program @4MHz 2uS
LDM TM1,#1010_1000b ; Set Clock & PWM3E
LDM T1PPR,#199 ; Period :400uS=2uSX(199+1)
LDM T1PDR,#99 ; Duty:200uS=2uSX(99+1)
LDM PWM1HR,00H
LDM TM1,#1010_1011b ; Start timer1
Resolution
Frequency
T1CK[1:0]
= 00(250nS)
T1CK[1:0]
= 01(500nS)
T1CK[1:0]
= 10(2uS)
10-bit
3.9kHz
0.98kHz
0.49kHz
9-bit
7.8kHz
1.95kHz
0.97kHz
8-bit
15.6kHz
3.90kHz
1.95kHz
7-bit
31.2kHz
7.81kHz
3.90kHz
Table 13-3 PWM Frequency vs. Resolution at 4MHz
Summary of Contents for MC80C0104
Page 108: ...MC80F0104 0204 Preliminary 104 Mar 2005 Ver 0 2 25 Emulator EVA Board Setting...
Page 115: ...APPENDIX...
Page 116: ......
Page 124: ...viii Mar 2005 Ver 0 2 MC80F0104 0204 Preliminary...