



















Installation Guide E1100
Page 14 of 20
Installation Guide E1100 26.01.2006
NTI AG/ LinMot
/
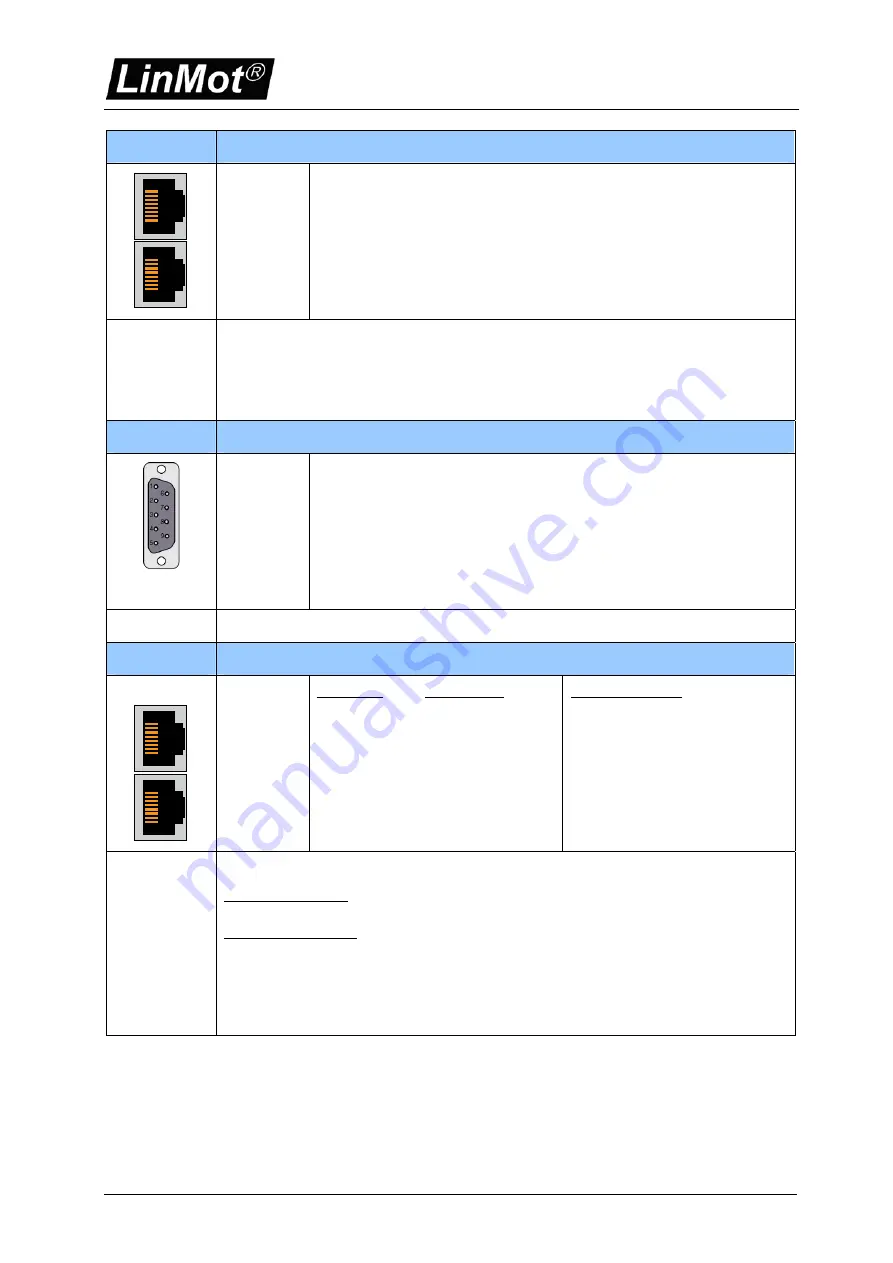
X7 - X8
RS485/CAN
1
8
1
8
1
2
3
4
5
6
7
8
case
R A
RS485_Rx- B
R Y
GND
GND
RS485_Tx- Z
CAN_H
CAN_L
Shield
RJ-45
Use twisted pair (1-2, 3-6, 4-5, 7-8) cable for wiring.
The built in CAN and RS485 terminations can be activated by S3.2 and S3.3.
X7 internally connected to X8
(1:1 connection)
X9:
Profibus DP
1
2
3
4
5
6
7
8
9
case
Not connected
Not connected
RxD/TxD-P
CNTR-P
GND
(isolated)
+5V
(isolated)
Not connected
RxD/TxD-N
Not connected
Shield
DSUB-9 (f)
Max. Baud rate:
12Mbaud
X10 / X11
Master Encoder IN (X10) / Master Encoder OUT (X11)
1
8
1
8
1
2
3
4
5
6
7
8
case
Incremental: Step/Direction:
A+
Step+
A- Step-
B+
Di
Z+
Zero-
Z- Zero+
B- Direction-
CAN_H (GP)
CAN_H (GP)
CAN_L (GP)
CAN_L (GP)
Shield
Shield
EIA/TIA 568A colors:
Green/White
Green
Orange/White
Blue
Blue/White
Orange
Brown/White
Brown
RJ-45
Use twisted pair (1-2, 3-6, 4-5, 7-8) cable for wiring.
Master Encoder Inputs:
Differential RS422, max. Input Frequency 2MHz, 240ns edge separation
Master Encoder Outputs:
Amplified RS422 differential signals from Master Encoder IN (X10)
CAN internally connected to X7, X8
The CAN signals on X10/X11 are only available on GP controllers. With the –DP, -RS, -DN and CO
controllers use X7/X8 for connection the CAN bus instead.
All devices, which are connected to X10/X11 must be referenced to the same ground.







































































