















3DM683 Digital Stepping Driver Manual V1.0
Tel: +086 0755-26434369 21 Web Site: www.leadshine.com
Figure 24: Finish tuning and save setting to the driver
Notes:
However, if the user does not want to tune the current loop after changing a different stepping motor,
then
Motor auto-identification and parameter auto-configuration
technology of the 3DM683 can
replace manual tuning the driver with
ProTuner
. Just changes SW4 two times in 1 second, and then
the driver will auto-identify the new motor and auto-configure related control parameters for optimum
responses.
Recommend
use this function after changing the driven motor.
l
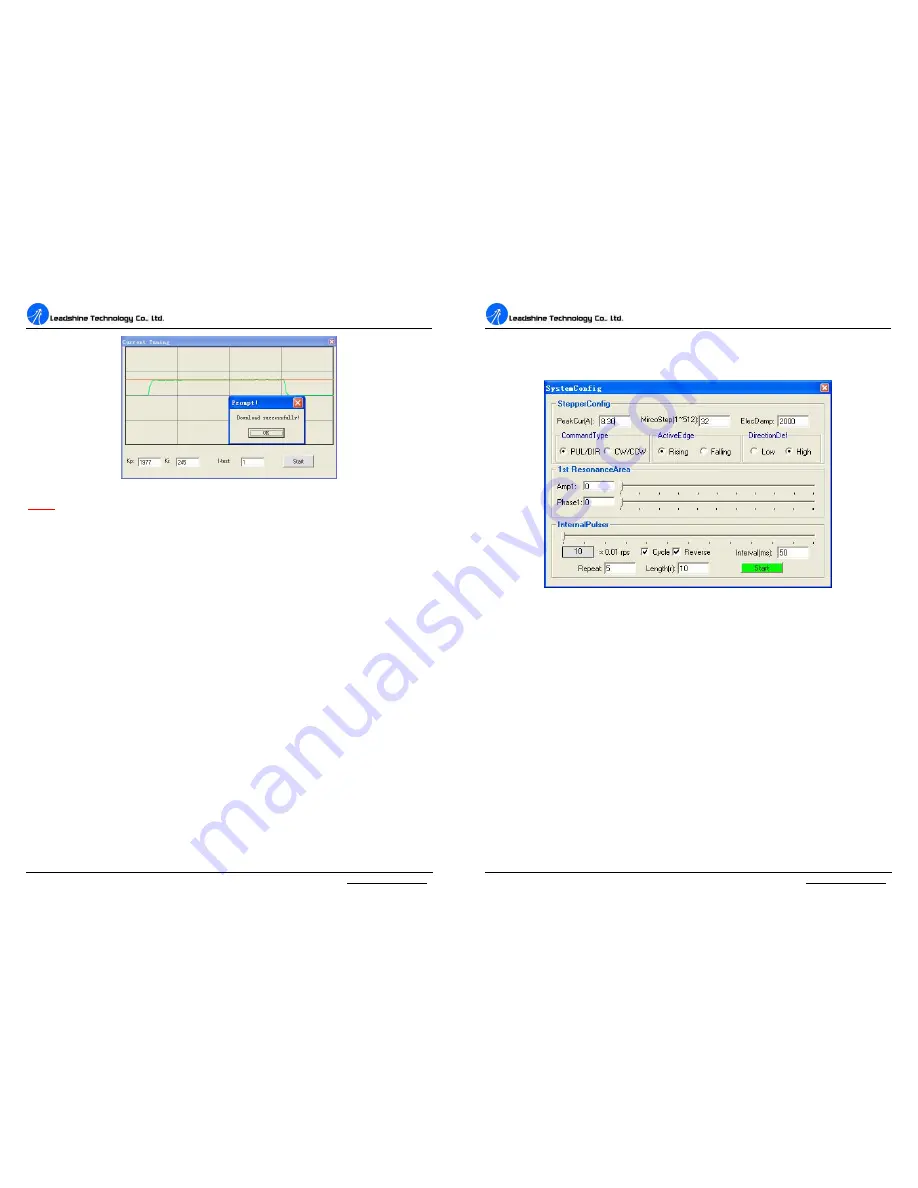
SystemConfig
:
In
SystemConfig
window, the user can configure Peak Current, Microstep, Command Type, Active
Edge, and eliminate motor resonance. A built-in pulse generator can be used for test during tuning.
See Picture 25.
PeakCur:
Peak Current
. The value is the peak current to the selected motor and can be set from 0.5
to 8.3 A. The user can set the peak current with
ProTuner
or DIP switches, see more information
about setting output current of the driver in section 5
“
Connecting the Motor
”
and section 7
“
Selecting Microstep Resolution and Driver Output Current
”
.
MicroStep:
Microstep Resolution
. The value is driver
’
s microstep resolution setting and can be set
from 1 to 512. The user can set the microstep with
ProTuner
or DIP switches, See more information
about setting output current of the driver in section 7
“
Selecting Microstep Resolution and Driver
Output Current
”
.
ElecDamp: Electronic Damping Coefficient
. The electronic damping restrain resonance of the
3DM683 Digital Stepping Driver Manual V1.0
Tel: +086 0755-26434369 22 Web Site: www.leadshine.com
system and prevent amplitude of the oscillation from increasing to the extend that it makes the motor
out of control. The optimal value depends on the system, and the default value is 3000.
Figure 25: SystemConfig window
CommandType: Command Type
of control signal, including PUL/DIR and CW/CCW. Set this
parameter according to
Command Type
of motion controller.
ActiveEdge: Active Edge.
The user can set the triggered edge of pulse command signal in this panel.
When the driver works in CW/CCW mode, no matter what level is at fixed level terminal, the driver
can works properly.
DirectionDef: Direction Definition.
Relate the default running direction to
a HIGH
level input in
DIR or
Low
level input in DIR. This panel is used for PUL/DIR command type only. Please note that
the default direction is also related to motor coil connections.
Anti-Resonance Introduction
Step motors are highly resonant, which results in vibration and ringing. The ringing utilizes a large
fraction of the motor's available torque
–
thereby wasting performance. Furthermore, at mid-range
velocities, the resonance can become so severe that the motor looses synchronization and stalls. The







































































