





























Issued: 22.04.2016 Version: Spez KR 20-3 V2
6 Planning
6
Planning
6.1
Information for planning
In the planning and design phase, care must be taken regarding the functions
or applications to be executed by the kinematic system. The following condi-
tions can lead to premature wear. They necessitate shorter maintenance in-
tervals and/or earlier exchange of components. In addition, the permissible
operating parameters specified in the technical data must be taken into ac-
count and observed during planning.
Continuous operation near temperature limits or in abrasive environments
Continuous operation close to the performance limits, e.g. high rpm of an
axis
High duty cycle of individual axes
Monotonous motion profiles, e.g. short, frequently recurring axis motions
Static axis positions, e.g. continuous vertical position of a wrist axis
External forces (process forces) acting on the robot
If one or more of these conditions are to apply during operation of the kinemat-
ic system, KUKA Roboter GmbH must be consulted.
If the robot reaches its corresponding operation limit or if it is operated near
the limit for a period of time, the built-in monitoring functions come into effect
and the robot is automatically switched off.
This protective function can limit the availability of the robot system.
6.2
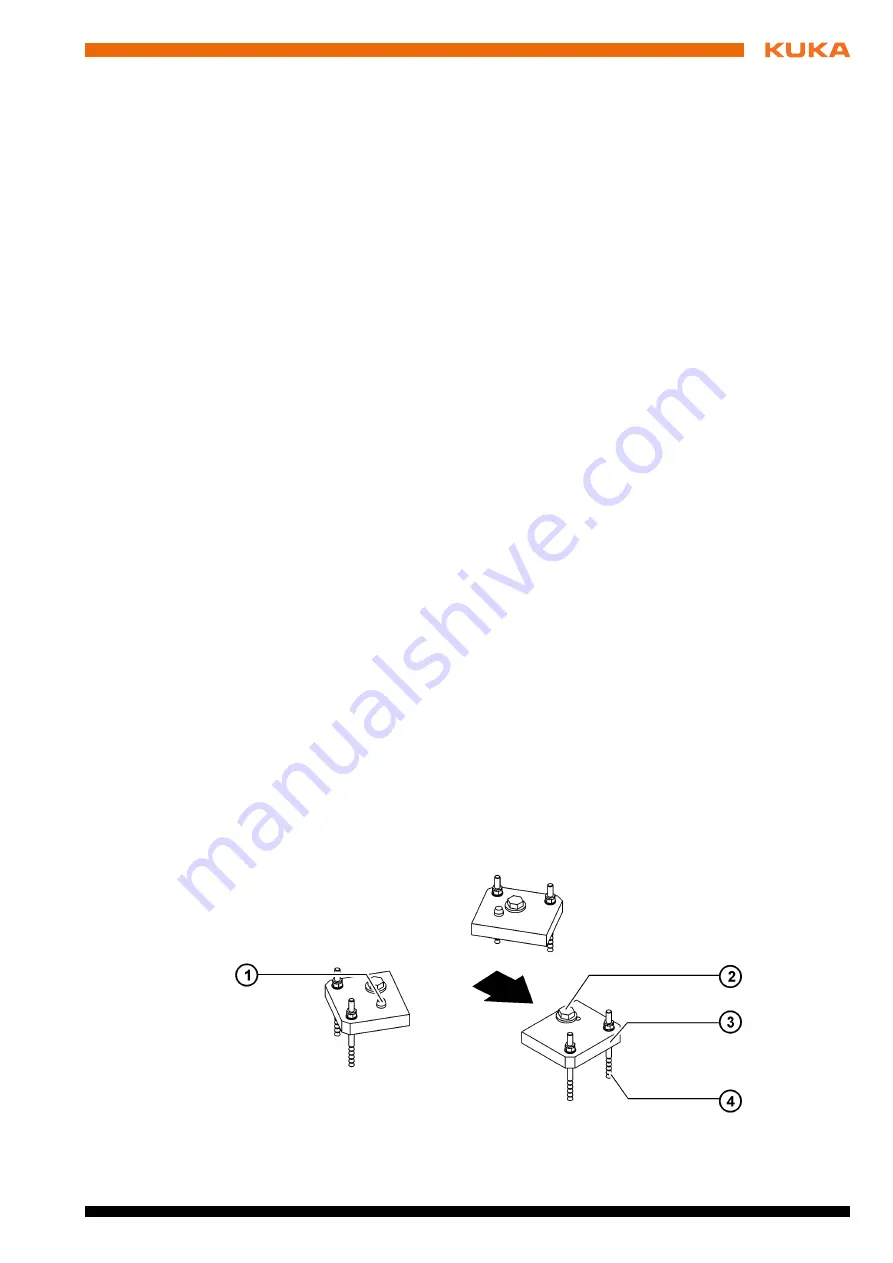
Mounting base with centering
Description
The mounting base with centering is used when the robot is fastened to the
floor, i.e. directly on a concrete foundation. The following variant is available:
Mounting base with centering (resin cartridge)
Both mounting base variants consist of:
Bedplates
Resin-bonded anchors
Fastening elements
These mounting variants require a level and smooth surface on a concrete
foundation with adequate load bearing capacity.
Fig. 6-1: Mounting base with centering
Summary of Contents for KR 20-3
Page 6: ...6 81 Issued 22 04 2016 Version Spez KR 20 3 V2 KR 20 3...
Page 8: ...8 81 Issued 22 04 2016 Version Spez KR 20 3 V2 KR 20 3...
Page 12: ...12 81 Issued 22 04 2016 Version Spez KR 20 3 V2 KR 20 3...
Page 42: ...42 81 Issued 22 04 2016 Version Spez KR 20 3 V2 KR 20 3...
Page 62: ...62 81 Issued 22 04 2016 Version Spez KR 20 3 V2 KR 20 3...
Page 68: ...68 81 Issued 22 04 2016 Version Spez KR 20 3 V2 KR 20 3...
Page 70: ...70 81 Issued 22 04 2016 Version Spez KR 20 3 V2 KR 20 3...
Page 78: ...78 81 Issued 22 04 2016 Version Spez KR 20 3 V2 KR 20 3...
Page 81: ...81 81 Issued 22 04 2016 Version Spez KR 20 3 V2 KR 20 3...







































































