





























141
www.keyestudio.com
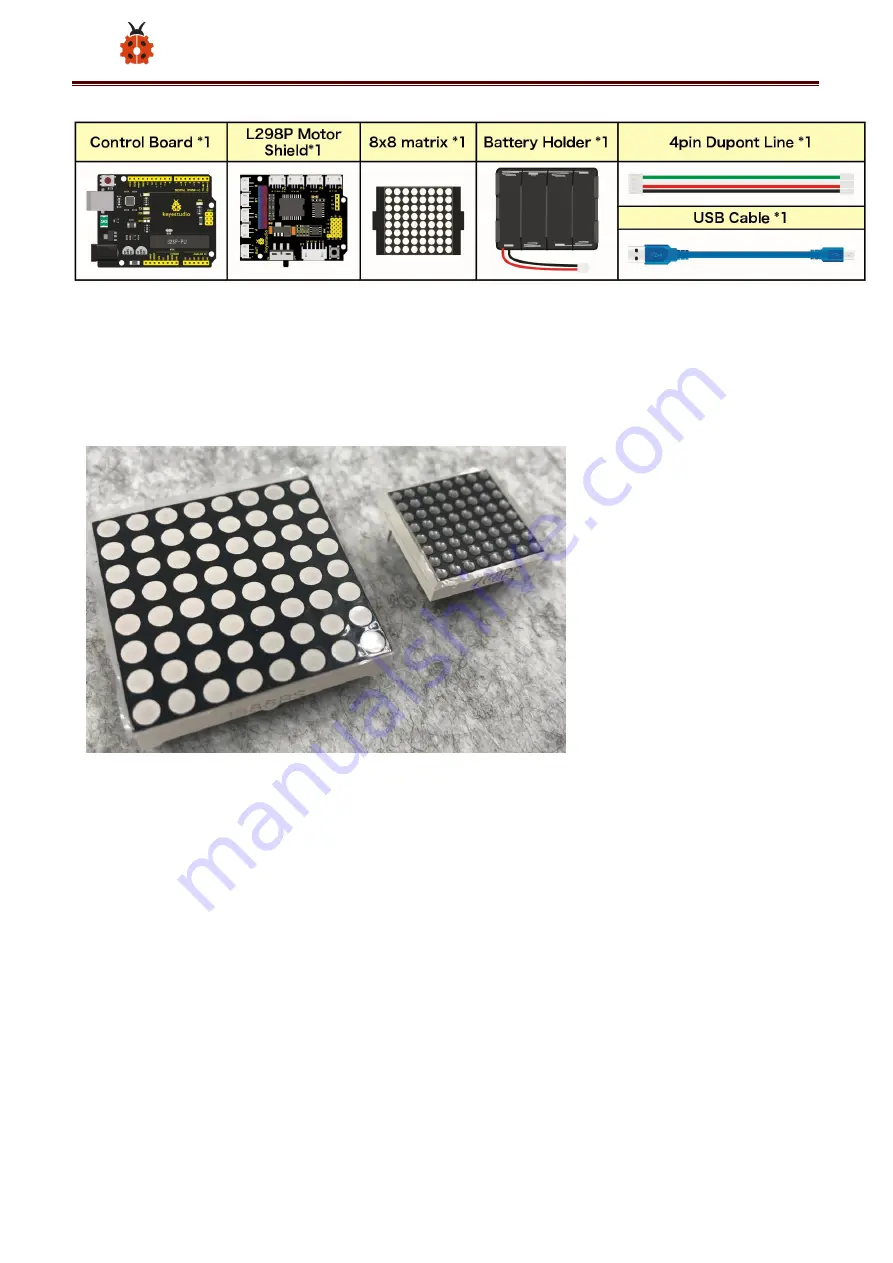
(3) 8*8 Dot Matrix
Composed of LED
emitting tube diodes,
LED dot matrix are
applied widely to public
information display like
advertisement screen and bulletin board, by controlling LED to show words,
pictures and videos, etc.
Divided into single-color, double-color, and three-color lights according to
emitting color , LED dot matrix could show red, yellow, green and even true
color.
There are 4×4, 8×8 and 16×16 different types matrix.
Summary of Contents for Smart Little Turtle Robot V3
Page 5: ...5 www keyestudio com 1 Introduction...
Page 16: ...16 www keyestudio com...
Page 17: ...17 www keyestudio com...
Page 18: ...18 www keyestudio com...
Page 19: ...19 www keyestudio com...
Page 22: ...22 www keyestudio com...
Page 24: ...24 www keyestudio com...
Page 25: ...25 www keyestudio com...
Page 26: ...26 www keyestudio com...
Page 28: ...28 www keyestudio com...
Page 29: ...29 www keyestudio com...
Page 30: ...30 www keyestudio com...
Page 31: ...31 www keyestudio com Step 7 Hook up Guide...
Page 32: ...32 www keyestudio com...
Page 33: ...33 www keyestudio com...
Page 44: ...44 www keyestudio com...
Page 48: ...48 www keyestudio com 4 Arduino IDE Setting Click icon open Arduino IDE...
Page 53: ...53 www keyestudio com Set board and COM port the corresponding board and COM port are...
Page 55: ...55 www keyestudio com Click to upload the program upload successfully...
Page 59: ...59 www keyestudio com...
Page 96: ...96 www keyestudio com 5 Connection Diagram...
Page 121: ...121 www keyestudio com 6 Then pop up the following page...
Page 122: ...122 www keyestudio com 7 Click Read Notify WriteWithoutResponse to enter the following page...
Page 129: ...129 www keyestudio com...
Page 143: ...143 www keyestudio com The definition inner pins are shown below...
Page 159: ...159 www keyestudio com 3 Connection Diagram 4 Test Code...
Page 167: ...167 www keyestudio com 2 Hook up Diagram...
Page 187: ...187 www keyestudio com 8 8 LED matrix shows rightward icon Flow Chart 2 Hook up Diagram...
Page 200: ...200 www keyestudio com 5 Click to enter the main page of turtle smart car...







































































