





The UAS ESC Series is optimized for the
KDE Direct UAS Brushless Motor Series
and will not require additional programming for most flight applications.
Throttle calibration is not required
–
the ESCs are factory-calibrated and the
proprietary control algorithm will dynamically adjust to the receiver (RX)
and/or flight controller for simple plug-and-play operation. If manual throttle
calibration is desired, this option can be selected via the
(DMA) programming kit (sold-separately).
1. Ensure the ESC control lead is connected to the throttle channel on your
receiver (RX) or flight controller, confirming correct orientation of plugs.
2. Turn on the transmitter (TX) and set the throttle-stick position to zero or
low (0% throttle signal) to arm the ESC circuitry.
3. Connect the battery or power system to the ESC power source leads. The
ESC will remain disarmed until a 0% throttle signal is received. An arming-
tone will be heard and the number of LiPo battery cells will be heard as
individual tones, followed by additional and final arming tones.
4. If arming tones are not heard, adjust the transmitter throttle end-points
(ATV/AFR) values until the arming sequence is heard. Check the operation
of the ESC with the receiver (RX) throttle channel for correct direction and
reverse if necessary (reverse direction for Futaba systems).
If the arming throttle signal (0%) is not applied when the power
source is first connected to the ESC, short tones will continuously
sound after approximately five (5) seconds. To remove this
warning tone move the throttle to 0% or disconnect power.
5. Check for proper rotation direction of each ESC/motor combination. To
change rotation direction, swap ANY two brushless motor lead connections.
New technologies incorporated into the latest production designs include:
•
Regenerative Braking
–
active braking during motor deceleration phase,
providing instantaneous response to the flight controller commands and
matched-response to acceleration profiles (less
“float”
during flight).
•
Temperature-Controlled Synchronous Rectification
–
new proprietary
algorithm for smooth-running motors at low-throttle and improved, faster
response under high-peak loads; all while significantly increasing flight-time
efficiency and reducing operating temperatures.
A wide-range of
KDE Direct UAS Brushless Motors
are available to suit your UAS
and multi-rotor applications; ranging from smaller 180-class (2S+) tuned
motors, up to industrial 1400-class (14S+) and larger motors.
ESC THROTTLE CALIBRATION
REVISION PR012
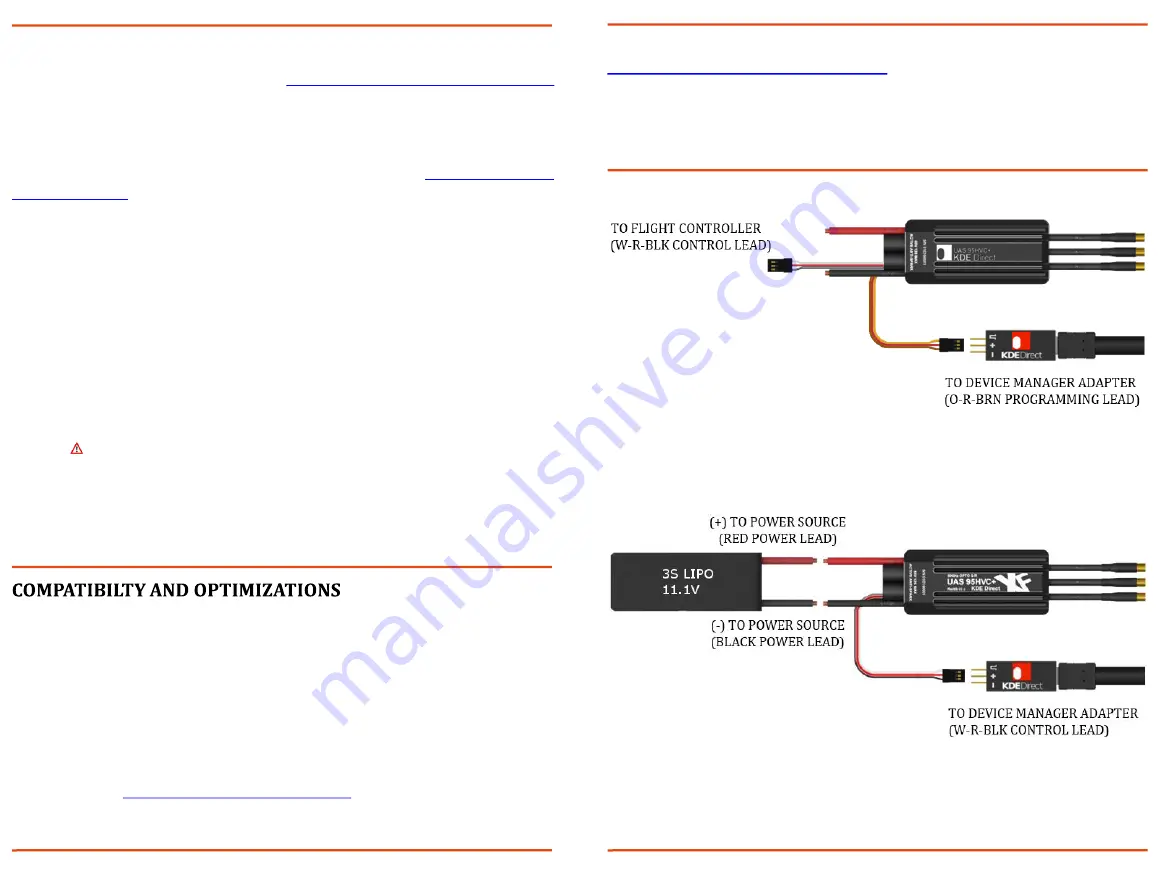
Pay close attention to proper wiring as shown in the diagrams. The ESC is
automatically powered via the USB DMA when using the Programming Lead
(orange-red-brown cable). External power is NOT required to properly arm and
program the microcontroller in most cases.
The KDE Direct DMA provides the ability to update and program the
KDE Direct UAS Brushless ESC Series
to the latest production firmware
releases, and customize advanced options for multiple applications.
Advanced technologies, such as Synchronous Rectification and
Regenerative Braking, can be enabled for enhanced performance and
optimized control algorithms.
DEVICE INSTALLATION AND WIRING
If the ESC does not include the dedicated Programming Lead or does not
connect, a 9V to 12V power source (2S or 3S LiPo preferred, 25V maximum) is
required for powering the ESC during programming. Once external power is
properly applied to the ESC, the microcontroller is programmed via connection
of the DMA to the Control Lead (white-red-black cable).
3
4







































































