















Figure 5
Collect by GNSS
Collect by GNSS performs RTK and other tasks as ex-
plained in other documents.
The RTK Status has the following format in the first row:
number of engines fixed
/
Minimum number of engines to ac-
cept epochs
:
Minimum number of engines for Verify
The second row of RTK Status: Number of RTK corrections
per second/Number of fixes per second.
Communication Status box shows the signal strength with
four bars, Line quality %, and Base ID number or seconds
of delay when communication is lost.
U
: UHF,
W
: Wi-Fi,
F
:
Frequency Hopping,
C
: Cellular,
L
: LAN
You can show/hide the inner white buttons by
holding
the “Level” button of Figure 4 or click it and check/un-
check the “Show Inner Buttons” of
Figure 5
. In J-Mate screens
button works similar to this “Level” button.
Hold the “Back” button of Figure 4 to customize the highlighted buttons (with red borders). By cus
-
tomizing the side buttons, you may have less need to use the white buttons and have wider screen
for viewing points. Hold the “Back” button again to release the customization mode. “Rest Buttons
to Default” re-established the factory button assignments.
White buttons are explained at the end of this section.
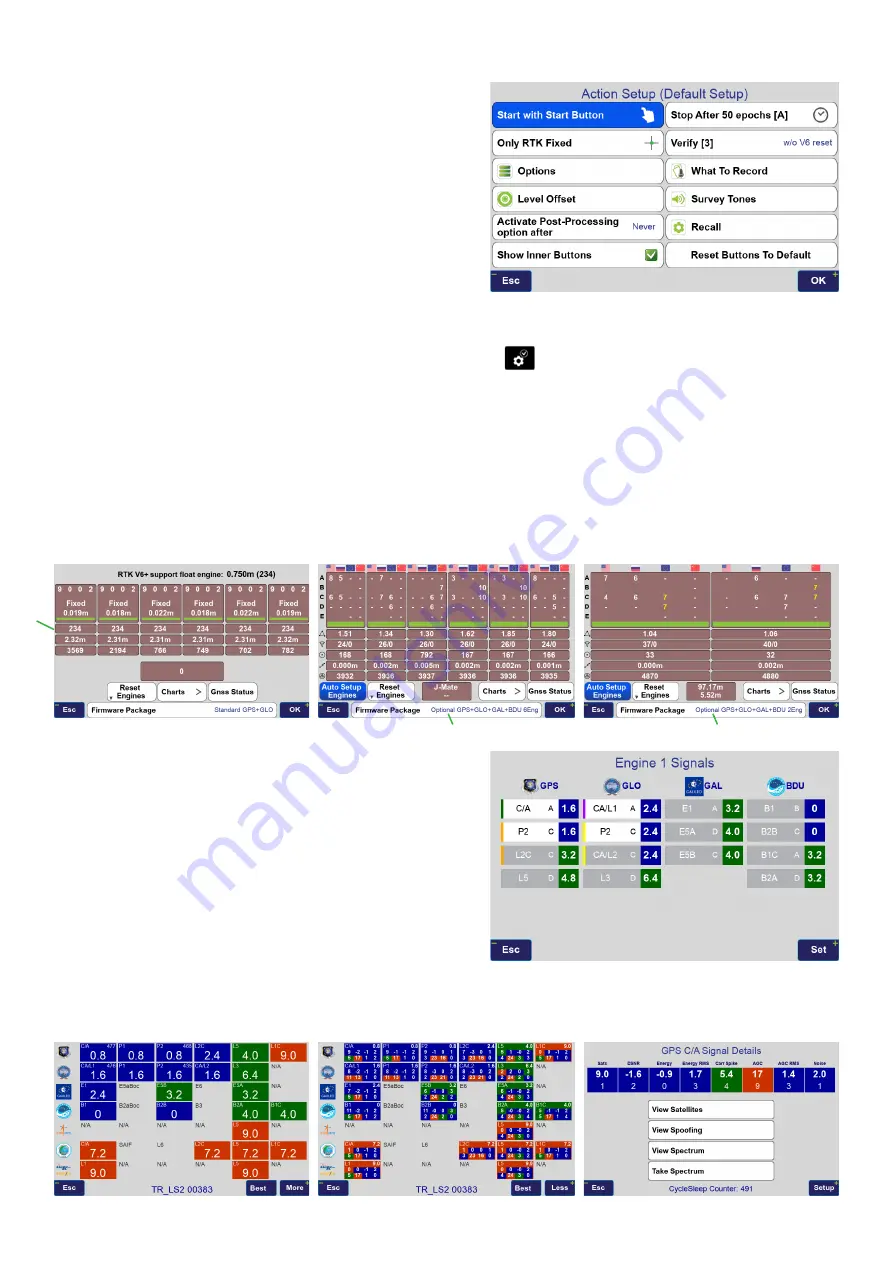
There are three
types
or RTK engines: 1) 6 engine GPS + GLONASS; 2) 6-engine multi constellation, and
3) 2-engine multi constellation. “Engine Type” selection button is on the bottom of the “engine view” screens.
Changing the engine type takes about one minute for the TRIUMPH-LS to reboot.
“Auto Setup Engines” button selects signals for each en-
gine automatically. You can click on each engine to reset
it, and long click to assign signals manually. The number
assigned to each signal in Figure 7 is the “Figure of Mer-
it” of that signal according to the number and strength of
that signal. “0” is perfect. “10” is very bad. “GDOP” of used
satellites are shown below each engine. Below that is the
number of signals used and number of signals rejected.
High number of rejected signals indicates of bad environ-
ment and large multipath. Below that is number of seconds
since last engine reset. Below that is the engine differences
in mm. Below that is the continuous running time.
“GNSS Status” button shows the Figure of Merit number for each signal. Click on any signal number to get
details. The lower the number, the better the signal.
GDOP
Engine Type Selection
Engine Type Selection
Figure 6
Figure 7
Figure 8





















































