




























TITAN GO Product Manual |
Wiring and Connections
INGENIA | 2022-07-14 08:35:14
64
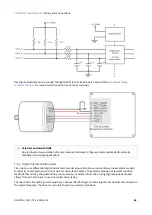
Next figure illustrates how to connect the digital halls to the Titan Go Servo Drive. Refer to
for more information about connections and wires.
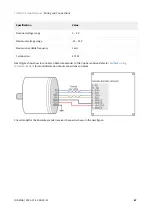
7.5.2 Digital Incremental Encoder
Titan Go can use differential digital incremental encoder inputs (also known as quadrature incremental encoders)
for velocity and/or position control, as well as commutation sensor. The encoder provides incremental position
feedback that can be extrapolated into precise velocity or position information. Using high resolution encoders
allows Titan Go Servo Drive to use sinusoidal commutation.
Channel A and channel B signals should have a phase shift of 90 degrees, indicating the rotation direction. Based on
the pulses frequency, the drive can calculate the motor velocity and position.
Velocity control with Halls
Due to inherent low resolution of motor mounted Hall sensors, they are not recommended for velocity
feedback in low speed applications.
Summary of Contents for Titan GO
Page 19: ...TITAN GO Product Manual Product Description INGENIA 2022 07 14 08 35 14 19 ...
Page 56: ...TITAN GO Product Manual Wiring and Connections INGENIA 2022 07 14 08 35 14 56 ...
Page 89: ...TITAN GO Product Manual Wiring and Connections INGENIA 2022 07 14 08 35 14 89 ...
Page 101: ...TITAN GO Product Manual Wiring and Connections INGENIA 2022 07 14 08 35 14 101 ...







































































