





















CR3145
mobileIoT gateway
10
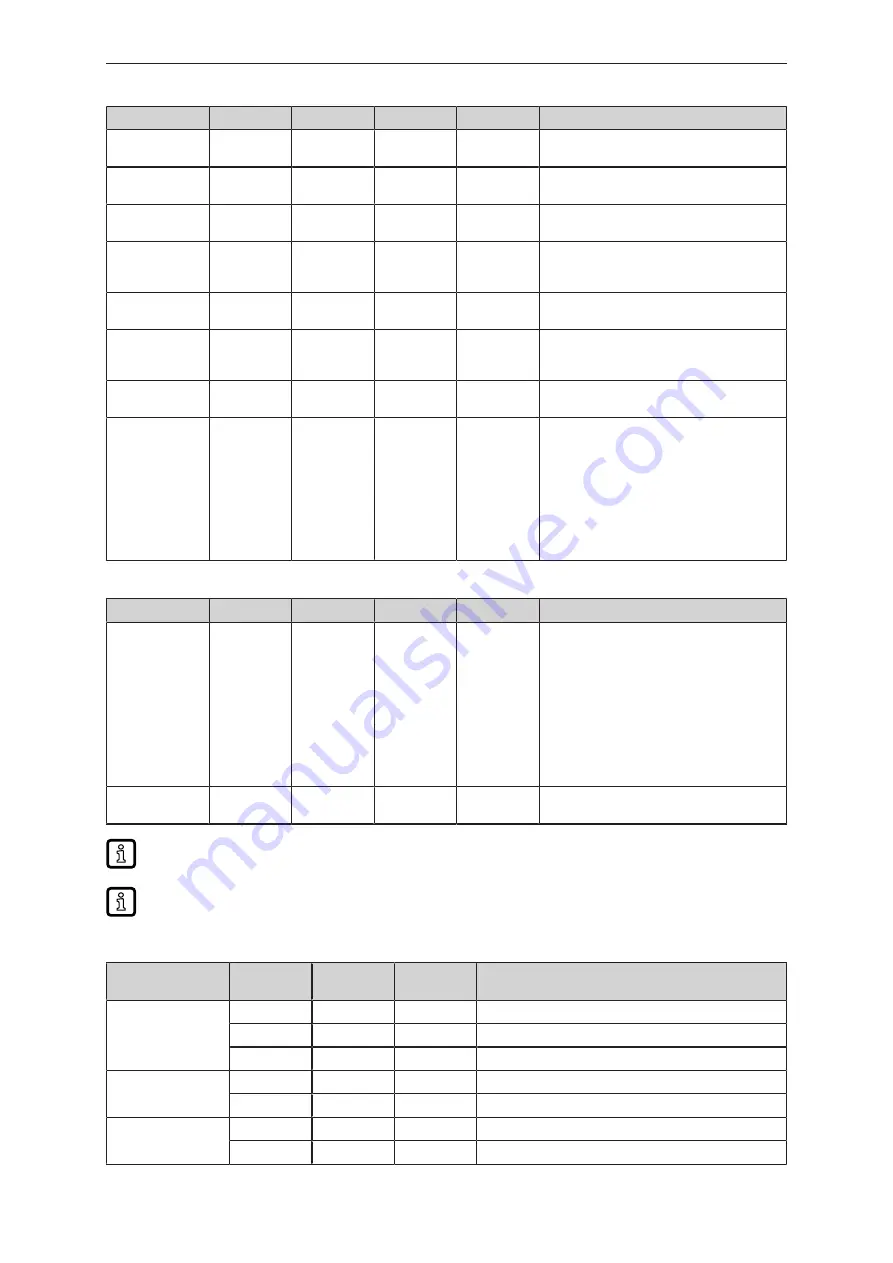
Object
Index
Subindex
Type
Default
Description
Positioning – lon-
gitude
0x5208
0x00
R32
ro
—
Longitude as a 32-bit floating point number
(decimal degrees)
Positioning – lati-
tude
0x5209
0x00
R32
ro
—
Latitude as a 32-bit floating point number
(decimal degrees)
Positioning – alti-
tude
0x520A
0x00
R32
ro
—
Height above mean sea level as a 32-bit
float (in mm)
Positioning –
speed over
ground
0x520B
0x00
R32
ro
—
Speed over ground as a 32-bit float (in m/s)
Positioning –
GPS odometer
0x520B
0x02
U32
ro
—
Total GNSS based distance as a 32-bit un-
signed integer (100 metres per bit)
Positioning – trig-
ger distance for
GPS odometer
0x520B
0x03
R32
ro
—
Distance in metres that the unit has to be
moved to start the odometer count
Positioning –
heading
0x520C
0x00
R32
ro
—
Course with respect to north as a 32-bit float
(decimal degrees)
Logging – cur-
rent GNSS posi-
tion
0x5200
0xF0
U8
rw
—
If this object is set to any value other than 0,
recording of the unit’s current GNSS position
starts.
If the unit has no GNSS reference point, it
waits for a reference point before logging the
position.
The flag remains on the written value until
the position has been recorded. It is then re-
set to 0.
The unit can send this data via the CAN interface. The configuration is made via the following objects:
Object
Index
Subindex
Type
Default
Description
DeviceMode
0x4001
0x02
U8
rw
—
Bit 0: compatibility mode with unit CR3114
(1 s cycle)
Bit 1: forward device status via CAN bus (1 s
cycle)
Bit 2: forward complete GNSS data via
CAN bus (1 s cycle)
Bit 3: forward input/output data via CAN bus
(1 s cycle)
Bit 4: forward acceleration and gyroscope
data via CAN bus (100 ms cycle)
Position BaseID
0x4005
0x06
U16
0x300
COB ID start address for input GNSS data
transmission (1s cycle)
All data available in the respective device mode are sent via the CAN1 interface.
The exact index and subindex can be found in the corresponding EDS file.
The GNSS data is mapped to the following CAN messages:
COB ID
Start byte
Length
(bytes)
Type
Object
Position
0x00
0
1
U8
Positioning – position data valid
1
1
U8
Positioning – active satellites
2
1
U8
Positioning – mode (GNSS)
Position
0x01
0
4
R32
Positioning – longitude
4
4
R32
Positioning – latitude
Position
0x02
0
4
R32
Positioning – altitude
0
4
R32
Positioning – heading







































































