








HITBOT Z-Arm
2140
E-Mail: [email protected]
APP Software Instructions of Z-Arm
2140
Technical support mailbox:
Reply in 24 hours
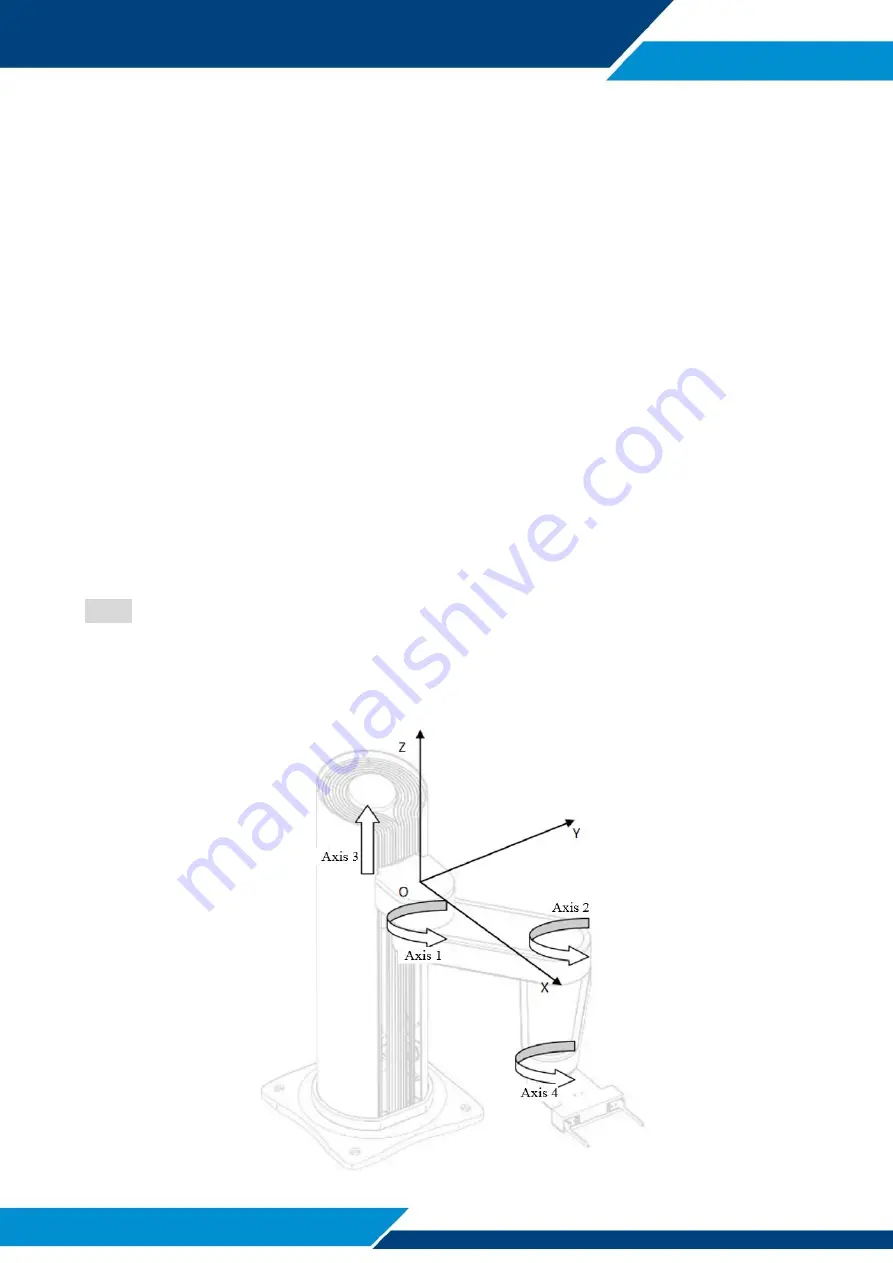
Before you start, you need to know the basic information below:
When it is controlled by the mobile terminal, the range of motion of each joint is defined as
follows:
Z axis (axis 3): [-210/-310mm, 0], the highest point is 0, and downward is negative;
Big arm (axis 1): [-90 degrees, 90 degrees], the front of the robot arm is 0°, and clockwise is
negative, counterclockwise is positive;
Small arm (axis 2): [-180 degrees, 180 degrees], the big arm along the direction away from the
machine is 0°, and clockwise is negative, counterclockwise is positive.
The end (axis 4): [-180, 180], the front of the machine is 0 °, and clockwise is negative,
counterclockwise is positive.
Note: At some special positions, the range of motion may be less than the above instructions.
For example, when the big arm is at 90° the small arm cannot reach 180° when it moves
anticlockwise, because it will collide with the machine.
Huiling-tech Robotic Co., Ltd







































































