





























40
1018856
08/2018 V04
Load rotation speed
n
2
= 40 [rpm]
Load torque (e. g. friction)
T
L
= 5
[Nm]
Load inertia
J
L
= 1.3 [kgm
2
]
Speed pattern
Acceleration; Deceleration
t
1
= t
3
= 0.1 [s]
Operate with rated speed
t
2
= 0.1 [s]
Stand still
t
p
= 1
[s]
Total cycle time
t
O
= 1.3 [s]
Load Conditions
Assume servo mechanism is used to cyclically position a mass with a horizontal axis of rotation.
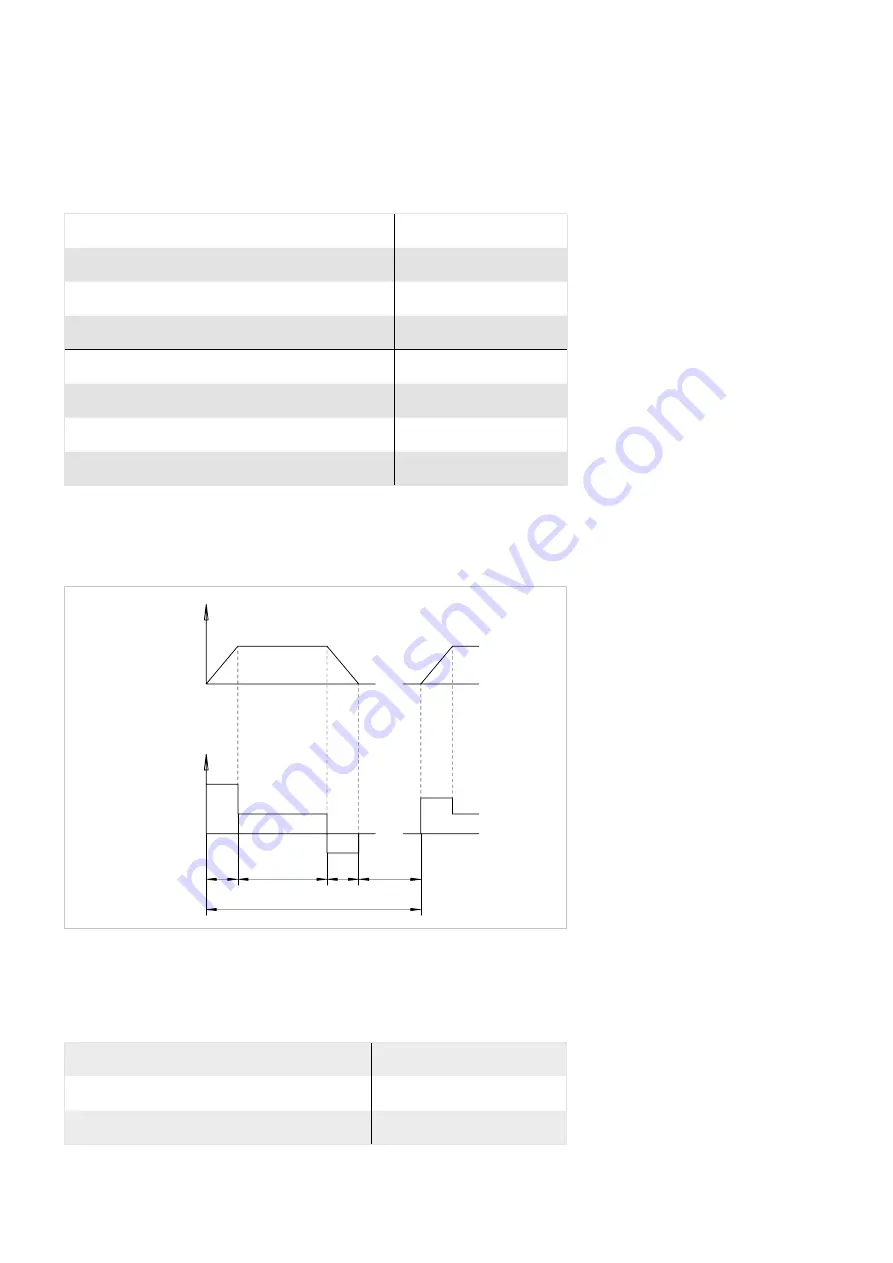
Speed patt
ern
Torque patt
ern
n
2
= 40 rpm
Speed n [rpm]
T
1
T
2
T
3
t
1
= 0.1
t
2
= 0.1
t
3
= 0.1
t
P
= 1
Torque T [Nm]
t
0
= 1.3
Note t
1
= t
3
Time t [s]
Time t [s]
Please note:
Each characteristic value should be converted to the value at the output shaft of the actuator.
Max. Torque
T
max
= 127 [Nm]
Max. Speed
n
max
= 112 [rpm]
Moment of inertia
J
Out
= 1.063 [kgm
2
]
Actuator data CanisDrive-25A-50
Example of actuator selection
Table 40.1
Illustration 40.2
Table 40.3







































































