






















LAH-80 Series Technical Document
- 3 -
3.
Specification
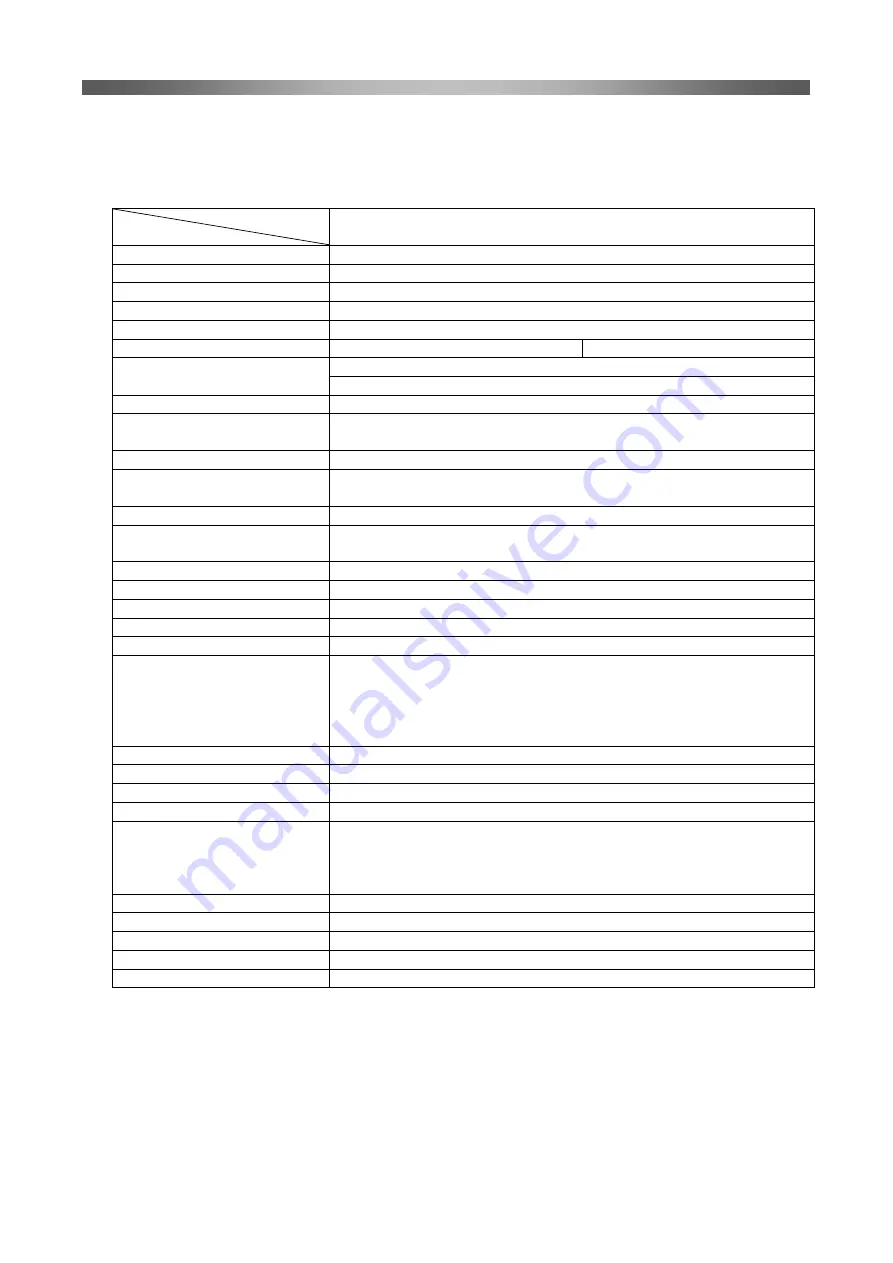
3-1 Linear actuator
Model
Item
LAH-80-5020-F-PA/PB
Stroke
50mm (±25mm)
Stroke upon a limit sensor trip
51mm (±25.5mm)
Resolution Note 1
2
μ
m
Maximum feed speed
10mm/S
Rated thrust Note 4
2000N (204kgf)
Maximum thrust Note 5
3000N (306kgf)
One-way positioning accuracy
Note 2
10
μ
m/50m stroke
4
μ
m/2mm stroke
Repeatability Note 2
±1
μ
m/1mm stroke
Reverse positioning accuracy
Note 2
10
μ
m/1mm stroke
Axial rigidity Note 3
40N/
μ
m
Allowable max. static axial load
Note 3
4000N
Allowable max. radial load Note 3 60N
Allowable max. rotational moment
Note 3
1N.m
Load Direction
Push direction or pull direction
Structure
Totally-enclosed, self-cooling
Lubrication
Grease
Operating Temperature
10
°
C to 25
°
C
Ambient Humidity
20 to 80%RH (No condensation)
Environment
Stainless (excluding the following parts)
Body machined parts: Aluminum (black alumite treatment) Motor: Black paint
Sensor cover: Aluminum (black alumite treatment)
Motor flange: Aluminum (alumite treatment)
Tightening screws of each part: Iron (black oxide finish or chromate treatment)
Storage temperature
-20
°
C to 50
°
C
Storage humidity
20 to 80%RH (No condensation)
Installation method
Directly connected to the flange
Installation orientation
No restriction (be careful of the holding force for vertical installation.)
Driving motor
Stepping motor: PK569A (B) W
Oriental Motor
Snap angle Full step: 0.72
°
/Step
Half step: 0.36
°
/Step
Protection function
End limit sensor (SMC: D-F79)
Shock resistance
294m/S2 (30G)
Vibration resistance
24.5m/S2 (2.5G)
Mass
5kg
Combined control unit
UDK5114NW2
(Note 1) Calculated value based on the screw lead, speed ratio of the reducer, and the number of splits of the
encoder.
Stepping motor type: Control unit half snap
(Note 2) According to JISB6201 (For the evaluation method, refer to section 4.)
The load orientation is one-way loading (refer to 4.3 of the Operation Manual).
One-way positioning accuracy ellipticity guaranteed temperature range is 20
±
1
°
C. Operating temperature
for other cases (10 to 25
°
C).
(Note 3) Refer to 5-1 to 5-4.
(Note 4) Generated thrust with a torque at the motor rating or equivalent
(Note 5) Thrust determined by the dynamic load rating of the ball screw used







































































