





























19
Fast return has the following advantages:
•
Robot reaches the recharging base in less time and causes less batteries wear.
•
Robot reaches the recharging base in less time and can exit earlier to work for a new cycle (however,
during work times set on menu)
•
Less traces on garden
•
Robot drives less distance on the wire, reducing the probability of blackout problems.
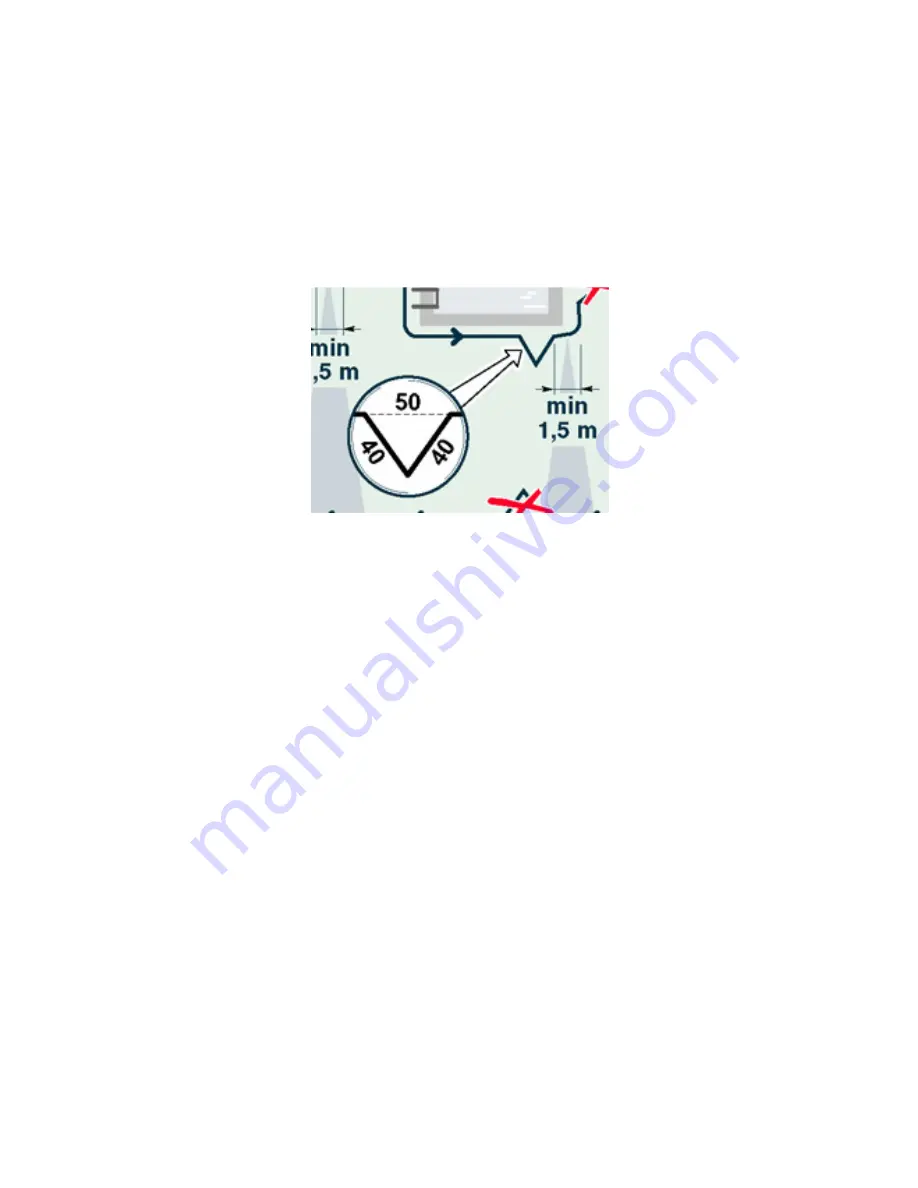
Arrow dimensions shall be in accordance to the figure in the following.
Arrows are to be located in accordance to the following requirements:
•
Arrow dimensions in figure above are approximate. In some situations, especially due to wheels slip,
it could be necessary to increase dimensions. It is suggested to verify the correct detection of the
arrows at the end of installation with batteries not completely charged
•
There shall be at least 2m (80inc) of straight wire before the arrow
•
There shall be at least 1.5m (60inc) of straight line after the arrow
•
There shall not be bumps along the whole path from 2m before to 1.5m after the arrow
•
Arrows are not to be located in the wire section before the recharging base, otherwise the robot will
never dock properly
•
The robot shall not have the left wheel on a sidewalk or on slippery ground for the whole path from
2m before to 1.5m after the arrow
•
Going to secondary areas, the robot does not identify arrows
•
If a flowerbed (or, in general, an object delimited with border wire located inside the lawn) is big
enough to have one side (obviously the correct one) that allows the correct location of an arrow (2m
+ 1.5m straight wire), it is suggested to add the arrow so the robot can exit the wire following around
the flowerbed before than normally doing
•
An arrow could be located after the recharging base so, if the robot does not dock properly, can
come back to the base directly.
•
After the arrow has been detected, the robot can rotate of an angle that is not exactly the nominal 90°
angle. It is not possible to define an exact angle, since the rotation depends on the characteristics of
the ground where the arrow is located. Therefore it is suggested to:
o
Decide arrow position considering that the robot can rotate not exactly 90° (about 70°-110°)
o
Test each arrow at the end of installation (test using selected return to recharging base
method)
•
It is suggested to leave a stock of wire before or after the arrow so it can be modified and / or easily
moved at the end of installation in case of need
Summary of Contents for Alpina AR2 400
Page 14: ...14...
Page 39: ...39 Figure in the following shows a bad installation...





















































