





























35
●
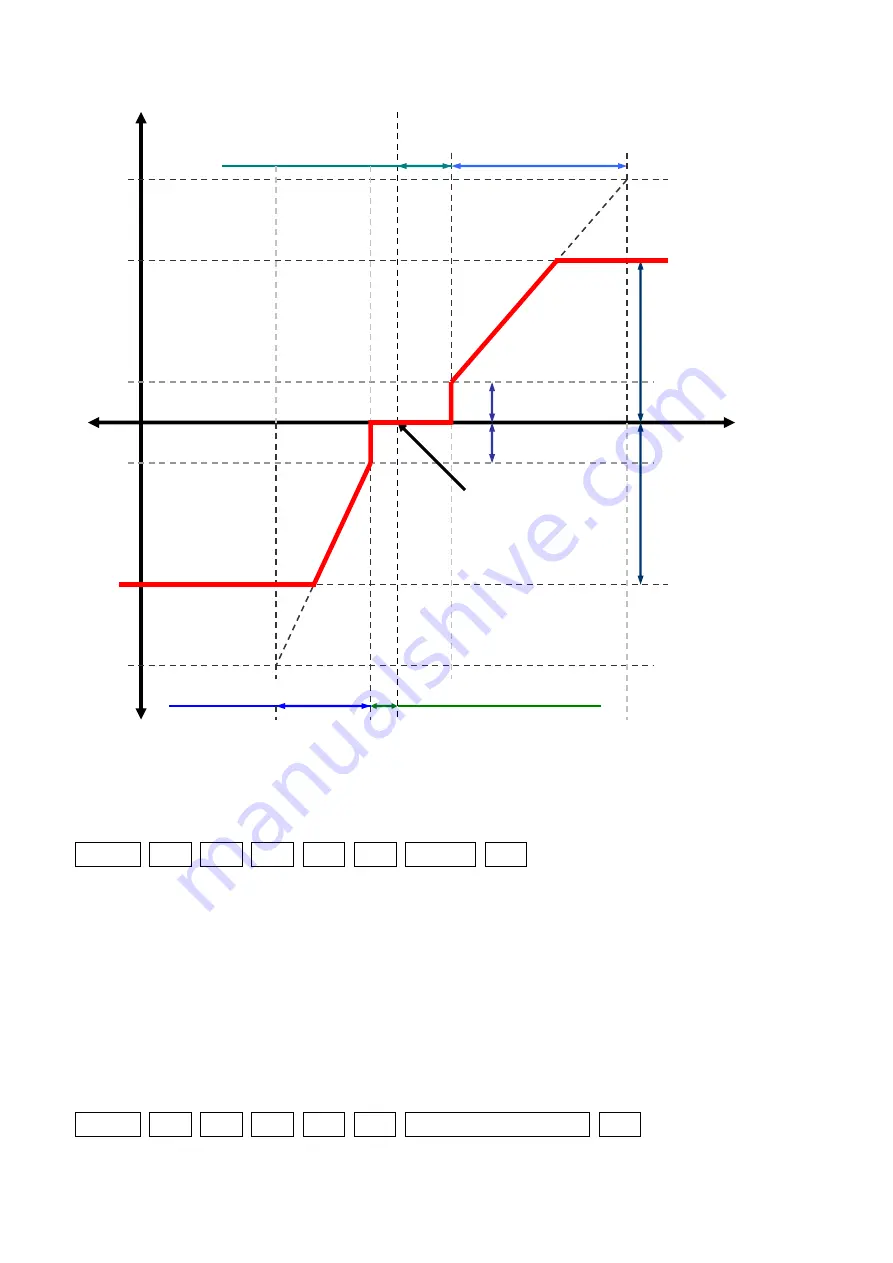
Fig. 4.1
The relationship of Output Torque, Angle and Compliance settings
Ex.1) Set Punch of the servo (ID: 1) to 1[%]( = 100(0064H)).
Hdr ID Flg Adr Len Cnt Dat Sum
FA AF 01 00 1C 02 01 64 00 7A
Ex.2) Set the servo (ID: 1) as shown below;
CW Compliance Margin
=
03H
CCW Compliance Margin =
03H
CW Compliance Slope
=
14H
CCW Compliance Slope
=
14H
Punch
=
0064H
Hdr ID Flg Adr Len Cnt Dat Sum
FA AF 01 00 18 06 01 03 03 14 14 64 00 7A
Output Torque
CCW
CW
CCW
CW
Present Angle
Goal position
【Punch】
【Punch】
【CW Compliance Slope】
【CCW Compliance Slope】
【CCW Compliance Margin】
【CW Compliance Margin】
Maximum Torque
Maximum torque
Maximum Torque
×【Max Torque(%)】
Maximum Torque
×【Max Torque(%)】
Summary of Contents for RS204MD
Page 39: ...39 FA AF 01 00 24 01 01 02 27...
Page 47: ...47 Dimensions RS204MD Fig 5 1 RS204MD without Servo Horn mm...
Page 49: ...49 Servo Horn and Free Horn for RS20x RS30x Fig 5 3 L Servo Horn R Free Horn...
Page 54: ...54 Dimensions of Terminal Board Use tape to fix TB 41AD Fig 5 11 Dimensions of TB 41AD mm...
Page 55: ...55 FUTABA CORPORATION 2019 May...






































































