

























20
GOV Basic(Governor Basic Setting)
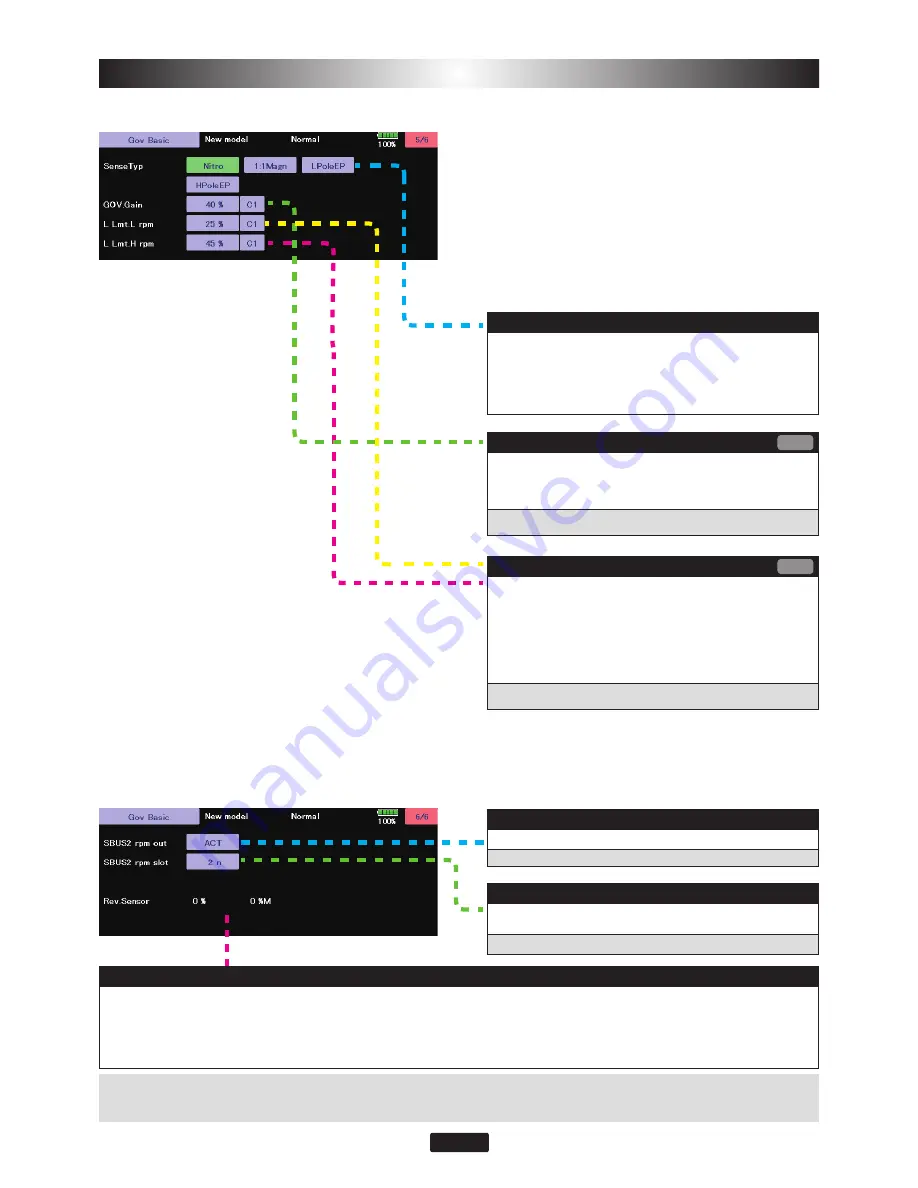
GOV Basic(Governor Basic Setting)
(11) SenseTyp: Sensor type
Select the type of governor sensor.
Nitro (BPS-1 backplate; Magnet Type)
1:1 Magnet "1:1 Magn" (Magnet type applied to helicopter part that turns at
the same RPM as the main rotor)
HPoleEP: For Electric motors 8 poles and above
LPoleEP: For electric motors 6 poles.
(12) GOV Gain: Governor gain
Governor Gain. If the value of the Governor Gain is set too low, the heli-
copter's RPM will fluctuate with collective and cyclic pitch changes. Con-
versely, if the number is too high, the RPM itself will fluctuate and surge
during flight.
Setting ranges: 1 ~ 100%
Initial value: Nitro = 40%, 1:1Magn = 60%, HPoleEP= 30%, LPoleEP = 10%
Cond
(13) L Lmt. L rpm / H rpm: Low limit RPM
Low RPM Limit sets the minimum amount of throttle that the governor will
command during an over-speed situation. Too low of value the engine
could shut off or not recover power quickly enough during the next collec-
tive movement. If the value is set too high, the governor will not control
overspeed when the rotor head is unloaded.
Use:
L Lmt. L rpm: For RPMS of 700-1700
L Lmt. H rpm For RPMS of 1701-4000
Setting ranges: L Lmt. L rpm = 0 ~ 80%, L Lmt. H rpm = 10 ~ 80%
Initial value: L Lmt. L rpm = 25%, L Lmt. H rpm = 45%
Cond
(14) SBUS2 rpm out: RPM display on transmitter
When displaying the rpm with the telemetry function, set it to ACT.
Setting: ACT (Active) / INH (Inhibit) Initial setting: INH
(15) SBUS2 rpm Slot: RPM display on transmitter
Set the slot number of the telemetry rotation sensor registered on the
transmitter side.
This must be set so that no slots overlap one another.
(16) Rev. Sensor: Revolution sensor testing
This menu is utilized to ensure that the revolution sensor is functioning properly.
In order to test the sensor, do NOT start the engine. Instead, we recommend turning the engine over by hand or the utilization of a starter. To prevent inadvertent
ignition of the engine, do NOT use a glow plug igniter when turning the engine over.
The numerical values on the left side of the display are the current value. The right side of the display indicates the maximum sensor value. The output level needs
to be more than 60% for correct governor operation. Also, when using the backplate sensor, the signal level of the backplate sensor varies depending on the rota-
tion speed (3,000 rpm or more is the detectable rotation speed).
By the telemetry function, the number of revolutions read by the governor sensor can be displayed on the monitor of the transmitter. In order to be able to display, activate the telemetry ro-
tation sensor (SBS-01RM) on the transmitter and set the gear ratio to 1.00.
Note:
It can not be used when the transmitter is FASSTest 12 CH system.







































































