





























Change even page title here
Chapter 3 Jumpers and Switches
FMEMCU-UG-960031-13
- 24 -
© Fujitsu Semiconductor Europe GmbH
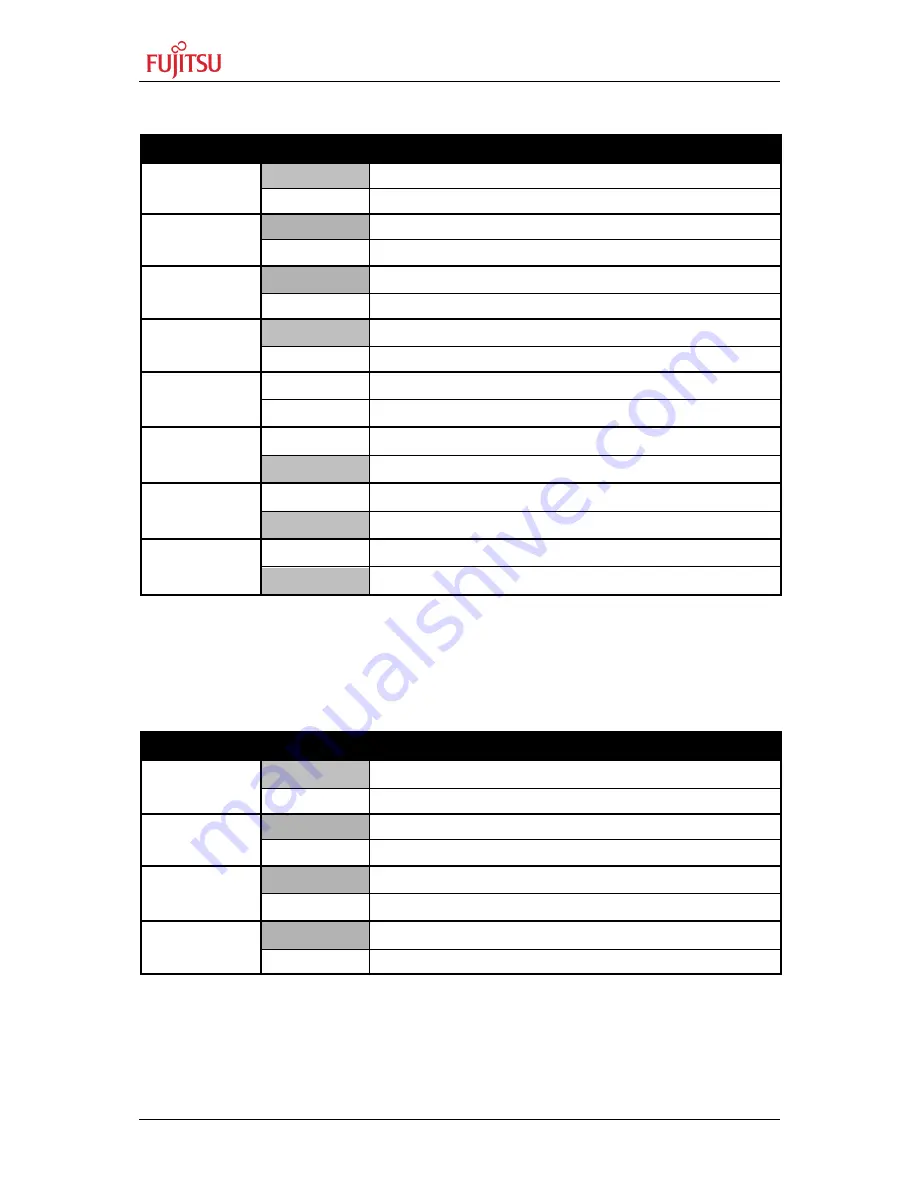
3.10.2 LIN-UART 2 (JP: 36, 37, 38, 39, 40, 42, 43, 45)
Jumper
Setting
Description
JP37
(RXD)
1-2
SIN2 is connected to RS232 transceiver
2-3
SIN2 is connected to LIN transceiver
JP39
(TXD)
1-2
SOT2 is connected to RS232 transceiver
2-3
SOT2 is connected to LIN transceiver
JP40
(RS232/LIN)
1-2
X9 pin 2 is connected to RS232 transceiver
2-3
X9 pin 2 is connected to LIN transceiver
JP36
(RTS-CTS)
Closed
RTS and CTS of X9 are connected
Open
RTS and CTS of X9 are not connected
JP38
(DTR/RTS)
1-2
DTR signal (pin 6 of X9) is used as reset source
2-3
RTS signal (pin 7 of X9) is used as reset source
JP43
(LIN enable)
Closed
LIN transceiver for X5 is enabled
Open
LIN transceiver for X5 is disabled
JP45
(LIN master)
Closed
LIN-UART2 is LIN Master
Open
LIN-UART2 is LIN Slave
JP42
(LIN Vbat)
Closed
LIN bus (X9 pin 1) is powered by the board
Open
LIN bus (X9 pin 1) is not powered by the board
Table 3-10: UART2 Settings
3.11 CAN interfaces
(JP: 24, 26, 34, 35)
Two high-speed CAN-
transceivers can be connected to the microcontroller‟s CAN interfaces
(CAN0 and CAN1).
Jumper
Setting
Description
JP24
(CAN0 RX)
Closed
RX0 is connected to CAN0 (X6)
Open
RX0 is disconnected to CAN0 (X6)
JP26
(CAN0 TX)
Closed
TX0 is connected to CAN0 (X6)
Open
TX0 is disconnected to CAN0 (X6)
JP34
(CAN1 RX)
Closed
RX1 is connected to CAN1 (X8)
Open
RX1 is disconnected to CAN1 (X8)
JP35
(CAN1 TX)
Closed
TX1 is connected to CAN1 (X8)
Open
TX1 is disconnected to CAN1 (X8)
Table 3-11: CAN Settings







































































