





























24
7.3 An Example of Actual I/O Communication Data
7.3.1 Extended Speed Control Instance
Presented herein is an actual communication data in the format of Extended Speed Control Instance, the factory
default format.
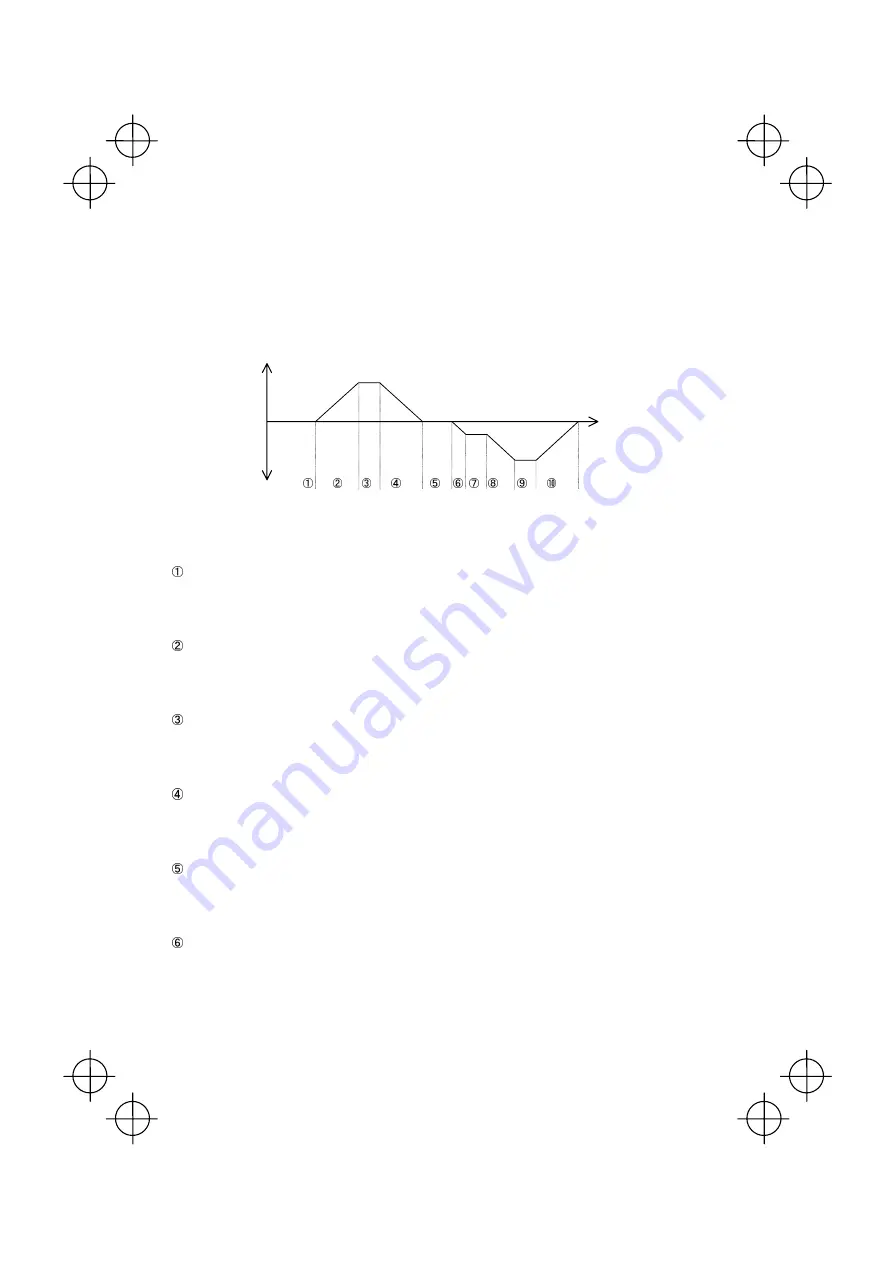
(1) Driving pattern example
Given below is an example of the driving pattern for controlling the inverter. Its corresponding I/O data is
shown in (2) below.
Forward
Reverse
Time (s)
1800 r/min
300 r/min
1800 r/min
Figure 7.1 Driving Pattern
(2) Description of I/O Data (The I/O data are in hexadecimal notation.)
Request:
Run command is OFF. Speed command = 1800 r/min (= 0708h). The run command and speed
command via DeviceNet are enabled.
60 00 08 07
Response:
Stopping. The inverter is ready.
70 03 00 00
Request:
Run forward command. Speed command = 1800 r/min (= 0708h). The run command and speed
command via DeviceNet are enabled.
61 00 08 07
Response:
The motor is running forward and accelerating. The actual speed is increasing.
74 04 ** **
Request:
Run forward command. Speed command = 1800 r/min (= 0708h). The run command and speed
command via DeviceNet are enabled.
61 00 08 07
Response:
Running forward. The actual speed has reached the Reference
F4 04 08 07
Request:
Run command is OFF. Speed command = 1800 r/min (= 0708h). The run command and speed
command via DeviceNet are enabled.
60 00 08 07
Response:
The motor is running forward and decelerating. The actual speed is decreasing.
74 05 ** **
Request:
No run command. Speed command is changed to 300 r/min (= 012Ch). The run command and
speed command via DeviceNet are enabled.
60 00 2C 01
Response: Stopping. The inverter is ready.
70 03 00 00
Request:
Run reverse command. Speed command = 300 r/min (= 012Ch). The run command and speed
command via DeviceNet are enabled.
62 00 2C 01
Response:
The motor is running backward (in the reverse direction) and accelerating. The actual speed is
increasing.
78 04 ** **
Summary of Contents for OPC-G1-DEV
Page 1: ...ENGLISH English Version...
Page 39: ...MEMO...





















































