





























7.8 Adjusting the hard-over time —
Evolution
On vessels without a rudder reference transducer, it
is important to set a Hard Over Time.
Before attempting to follow this procedure ensure
you have read and understood the Rudder Check
warning provided in this document.
To estimate your hard over time follow the steps
below:
1. With the autopilot in
Standby
, manually turn the
rudder / engine full to port. (For vessels with
power steering the engine should be running
when turning the rudder.)
2. Engage
Auto
mode.
3. Press the
+10
and
+1
buttons at the same time
(p70/p70s) or use the
Rotary
(p70R/p70Rs) to
alter your locked heading by 90 degrees. Use a
stop watch to time the movement of the rudder /
engine.
4. Estimate how long it would take to move the
rudder from full port to full starboard. This
estimate is your
Hard Over Time
.
5. Enter this estimate as your Hard Over Time. The
Hard Over time setting can be accessed from the
Drive Settings menu:
Menu > Set-up > Autopilot
Calibration > Drive Settings > Hard Over Time
.
6. After setting your Hard Over Time, observe your
autopilot’s behavior and if required, make small
adjustments to the Hard Over Time value until a
satisfactory result is achieved.
Warning: Rudder check
If no rudder reference has been fitted you
MUST ensure that adequate provision is
made to prevent the steering mechanism
from impacting the end stops.
7.9 Compass linearization — Evolution
autopilots
The EV unit’s internal compass needs to compensate
for local and the Earth’s magnetic fields. This is
achieved using an automatic process known as
linearization.
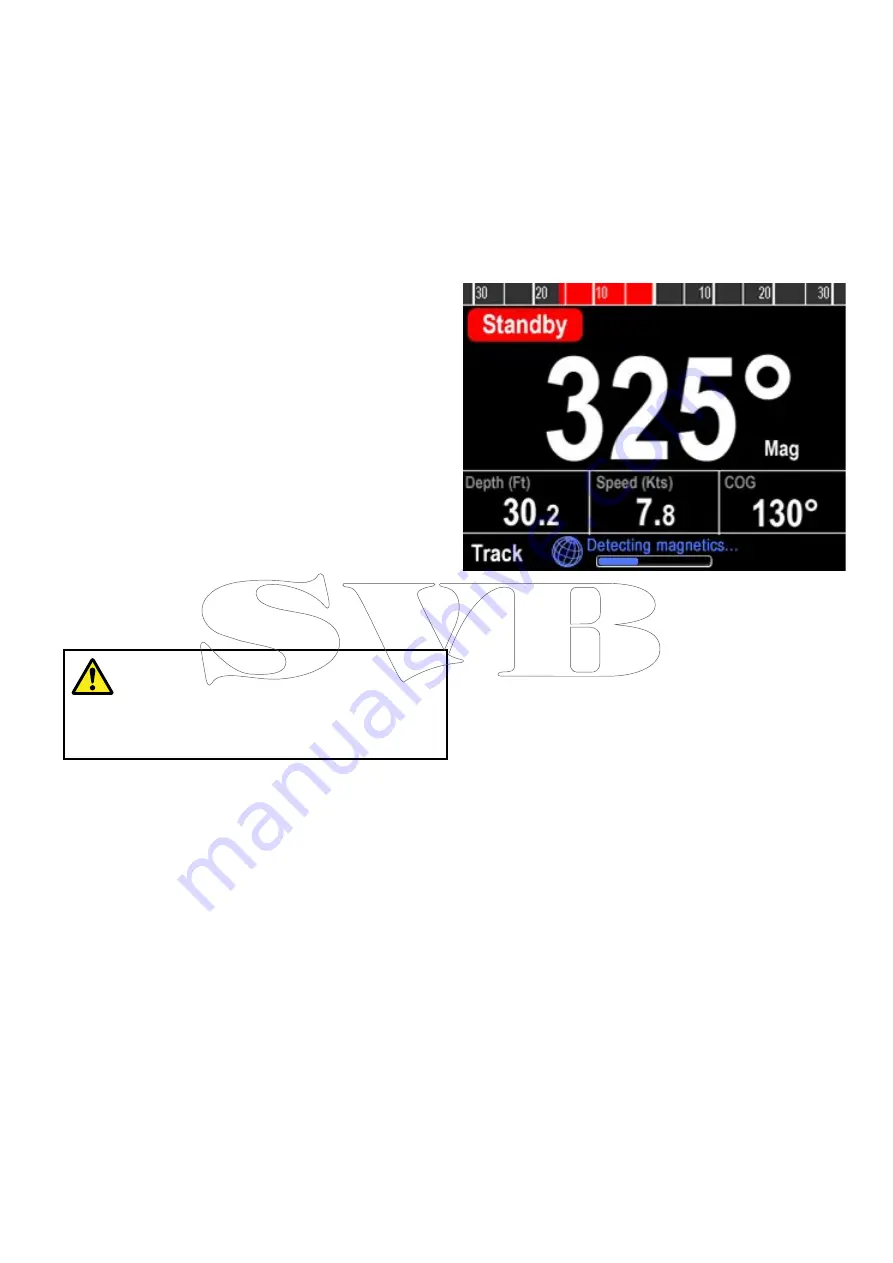
Initial linearization
When the EV unit is first installed and powered-up (or
after a factory reset or compass restart) linearization
is required. A progress bar is displayed to indicate
linearization is required.
The linearization process will start automatically
after your vessel has turned approximately 100°
at a speed of between 3 –15 knots. Linearization
requires no user input, however at least a 270°
turn is required before linearization can complete.
The progress bar will fill to indicate progress, the
progress bar will turn Red if the process is paused or
otherwise interrupted. Time it takes to complete the
linearization will vary according to the characteristics
of the vessel, the installation environment of the
EV unit, and the levels of magnetic interference
at the time of conducting the process. Sources of
significant magnetic interference may increase the
time required to complete the linearization process.
Examples of such sources include:
• Marine pontoons
• Metal-hulled vessels
• Underwater cables
You can speed-up the linearization process by
completing a full 360° turn (at a speed of 3 – 15
knots). You can also restart the linearization process
at any time by selecting the
Restart Compass
menu
item.
Once the initial linearization is completed the
Deviation page is displayed and the current
maximum compass deviation is shown.
Commissioning - Evolution autopilot system
47
Summary of Contents for 00723193774298
Page 2: ......
Page 4: ......
Page 10: ...10 p70s p70Rs ...
Page 14: ...14 p70s p70Rs ...
Page 28: ...28 p70s p70Rs ...
Page 40: ...40 p70s p70Rs ...
Page 50: ...50 p70s p70Rs ...
Page 60: ...60 p70s p70Rs ...
Page 70: ...70 p70s p70Rs ...
Page 76: ...76 p70s p70Rs ...
Page 82: ...82 p70s p70Rs ...
Page 96: ...96 p70s p70Rs ...
Page 112: ...112 p70s p70Rs ...
Page 120: ...120 p70s p70Rs ...
Page 123: ......





















































