




























TXT
Smart Home
ROBOTICS
36
Robotics Sensor Station IoT
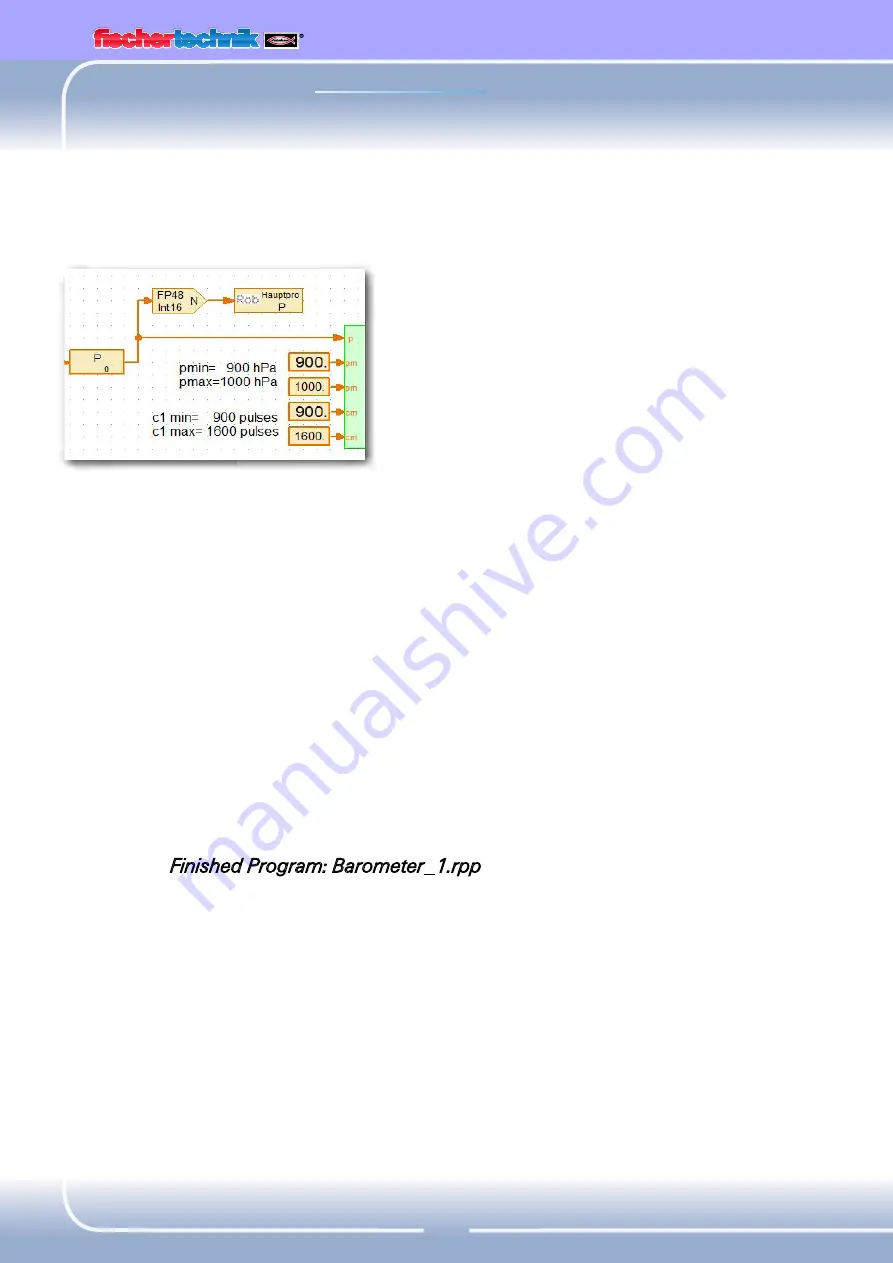
Dock the following program excerpt on output P.
The values logged in the subroutine “Calculate_
Pos” are processed. The pointer position is
calculated in the subroutine “PosX”.
Before displaying the currently measured atmospheric pressure, the
point needs to move to the 0 point (pushbutton). This is accomplished
in the subroutine “PosEm”. When this is closed mechanically by the
pointer, the program moves to the actual measured point and indicates
the currently measured atmospheric pressure or applicable weather
symbol.
The atmospheric pressure is measured anew every 3 seconds. If
the atmospheric pressure changes, the new value is checked by the
subroutine PosEMD. If the atmospheric pressure increases or decreases,
the program moves the pointer accordingly.
After completing the program, you can test it and save it on your
computer.
Finished Program: Barometer_1.rpp





















































