





























Chapter 4 Operation
- 54 -
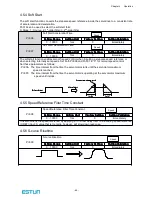
4.3.4 Setting for Holding Brakes
The holding brake is used when the servodrive controls a vertical axis.
A servomotor with brake prevents the movable part from shifting due to gravity when the servodrive
power goes OFF. (Refer to
4.1.4
4.1.4
4.1.4
4.1.4 Trial
Trial
Trial
Trial Operation
Operation
Operation
Operation for
for
for
for Servomotor
Servomotor
Servomotor
Servomotor with
with
with
with Brakes
Brakes
Brakes
Brakes
.
)
1. The brake built into the servomotor with brakes is a deenergization brake, which is used to hold and
cannot be used for braking. Use the holding brake only to hold a stopped servomotor.
2. When operating using only a speed loop, turn OFF the servo and set the input reference to 0V when
the brake is applied.
3. When forming a position loop, do not use a mechanical brake while the servomotor is stopped
because the servomotor enters servolock status.
(
1
1
1
1
)
Wiring
Wiring
Wiring
Wiring Example
Example
Example
Example
Use the servodrive sequence output signal /BK and the brake power supply to form a brake ON/OFF
circuit.
The following diagram shows a standard wiring example.
Vertical axis
Servomotor
Holding brake
Prevents the servomotor
from shifting due to
gravity when the power is
O F F .
External force
Servomotor
Prevents the servomotor from
shifting due to external force.
Shaft with external force applied
M
P G
B K
U
V
W
C N 2
L1
L2
L3
L 1C
L2C
*1
*2
C N 1
Power supply
R
S
T
S ervodrive
B K -R Y
( / B K + )
( / B K -)
+2 4 V
B K -R Y
Brake power supply
Yellow or blue
W h ite
R e d
B la c k
A C
D C
Servomotor with brake
B K -R Y
:
Brake control relay
1*
、
2*
:
The output term inals allocated with Pn 5 1 1 .







































































