














5 Parameters
5.4 “Advanced” parameter group
DB1 Variable Frequency Drives
09/17 MN040034EN
www.eaton.com
43
5.4 “Advanced” parameter group
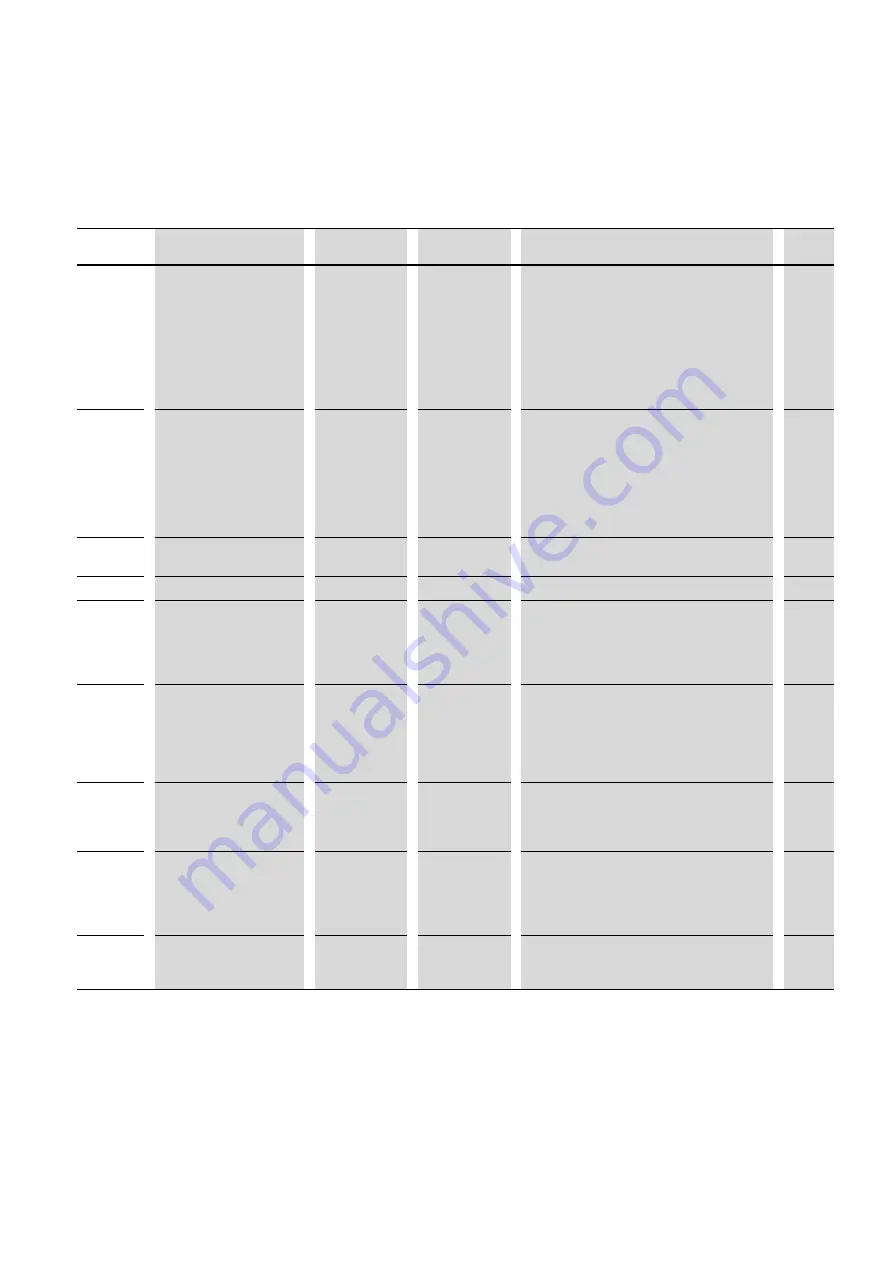
Table 23: “Advanced” parameter group
Parameter
Name
min. value
max. value
Description
DS
P-60
Motor Control Mode
0
4
Motor Control Mode
An autotune must be performed if setting 2 up to 4
is used. It is recommended with setting 0
0: Speed control with torque limit (vector)
1: Speed control (V/f)
2 : PM motor speed control
3: Brushless DC motor speed control
4: SyncRel motor speed control
1
P-61
Motor Identification
0
1
Motor Identification
If P-61 is set to 1, auto-tuning will start
automatically when the motor is stopped in order
to determine the motor parameters for optimum
control and efficiency. Following completion of the
autotune, the parameter automatically returns to
0.
0
P-62
MSC Gain
0.00 %
200.00 %
Speed controller Gain for Kp and Ti as combined
value
50.00 %
P-63
I-CurrentLimit
0.10 %
175 %
Current limit in amperes x 10, one decimal place
150 %
P-64
Motor Stator Resistance R1
0.00 Ohm
655.35 Ohm
Stator resistance of the motor
For induction and PM motors: Resistance value
phase / phase [Rs] in Ohms. This value is
determined during the motor identification run.
f(I
e
)
P-65
Motor stator inductance
d-axis
0.0 mH
6553.5 mH
Stator inductance of the motor, magnetizing
For induction motors Inductance phase / phase in
henry units [H]
For PM motors: d-axis inductance phase [Lsd] in
henry units [H]
f(I
e
)
P-66
Motor stator inductance
q-axis
0.0 mH
6553.5 mH
Stator inductance of the motor, torque producing
For PM motors: q-axis inductance phase [Lsq] in
henry units [H]
f(I
e
)
P-67
f-DCBrake@Stop
0.0 Hz
P-01
Output frequency in Hz at which DC braking starts
during the deceleration phase.
If “Stop Mode” is set to coasting, DC braking starts
at stop command immediately.
0.0 Hz
P-68
DC-Brake Current
0.0%
100.0%
Amount of DC current as a percentage of the
”Motor Nom Current” that is injected into the
motor during DC braking.
20.0 %





















































