



















J7886 D180 v1.1
Page 14 of 20
5.2 AP Modes
HDG: HEADING MODE – ROLL SERVO
In Heading Mode, the AP uses the roll servo to
control the aircraft’s magnetic heading.
You may adjust the heading bug to direct the
aircraft to a new target heading with the AP
engaged.
NOTE: The magnetic heading is affected by wind.
TRK: GROUND TRACK MODE – ROLL SERVO
In Track Mode, the AP uses the roll servo to
control the aircraft’s GPS ground track.
You may adjust the heading bug to direct the
aircraft to a new target track with the AP engaged.
180: 180º TURN MODE – ROLL AND PITCH
SERVOS
This mode initiates a quick turnaround. The AP
enagages both servos to hold altitude in a left turn
until the aircraft is flying in the opposite direction,
and then remains in TRK and ALT hold modes.
NAV: GPS NAVIGATION MODE – ROLL SERVO To use the GPS-based NAV mode, the GPS must
have an active waypoint. When engaged, the AP
takes instruction from the GPS unit’s horizontal
navigation information.
ALT: ALTITUDE MODE – PITCH SERVO
In Altitude Mode, the AP uses the pitch servo to
control the aircraft’s altitude.
You may adjust the altitude bug to direct the
aircraft to a new target altitude with the AP
engaged.
NOTE
:
Input to engine power management is required to
climb or descend the aircraft within normal
operating airspeeds.
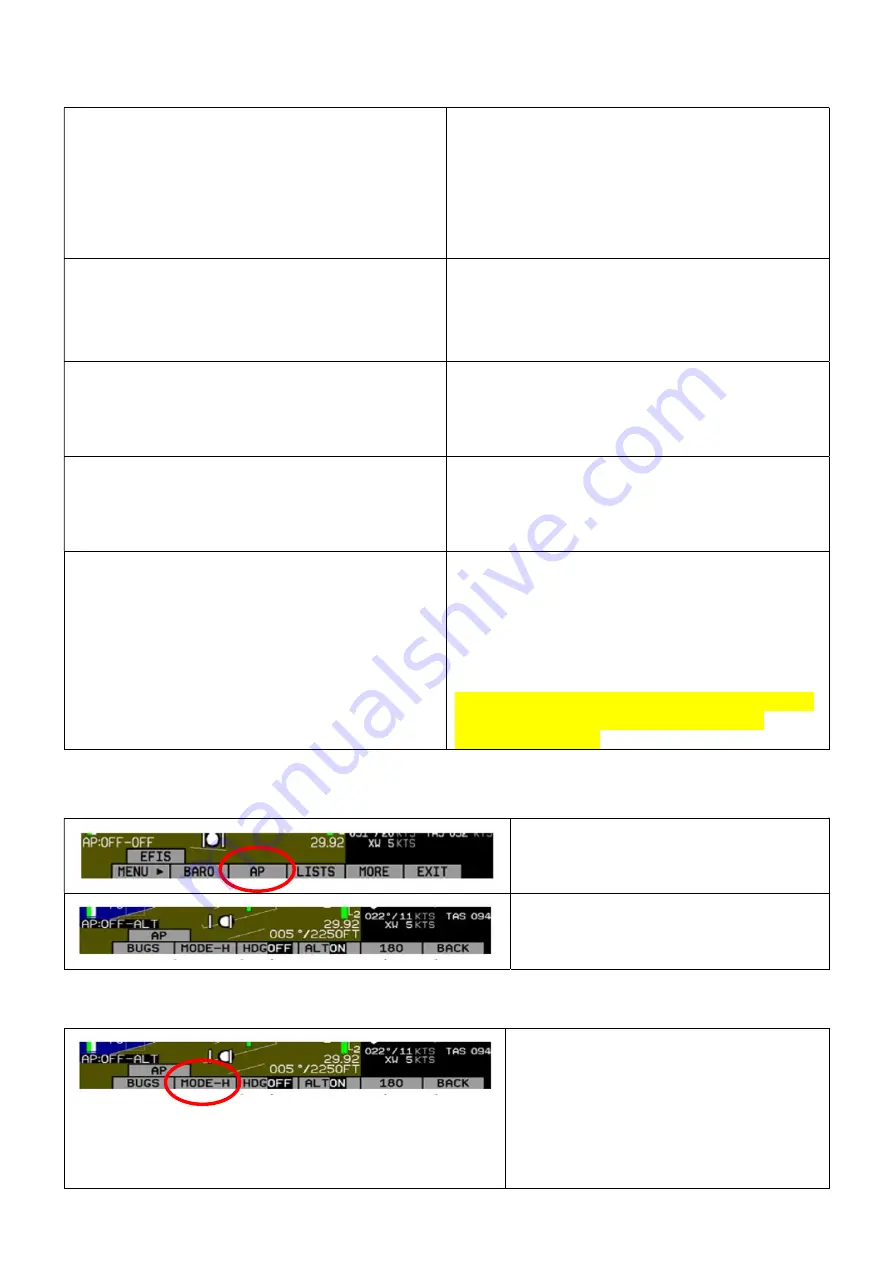
5.3 EFIS Autopilot Control
This section describes the various AP
control functions available via the EFIS >
AP menu.
The AP menu includes the buttons
shown:
5.3.1 Mode -(H, T, or N)
The MODE button is followed by the
currently active lateral mode: H (HDG), T
(TRK), or N(NAV).
Pressing this button brings up another
menu where you can select the armed AP
mode. As soon asyou select a mode, the
AP menu is immediately displayed again.


























































