



























KX-2 Robot
–
User’s Manual
Peak Robotics, Inc.
4747 Centennial Blvd; Colorado Springs, CO 80919
Ph 719.598.3555,
Printed: 3/3/2021
Page
85
14.0 User I/O & Emergency Stop
14.1 The robot contains digital inputs, analog inputs, and digital outputs that are available to the user,
and are controlled through the robot control software (DLL). They can be monitored and toggled
using the Teach Pendant Inputs/Outputs tab described in the previous sections.
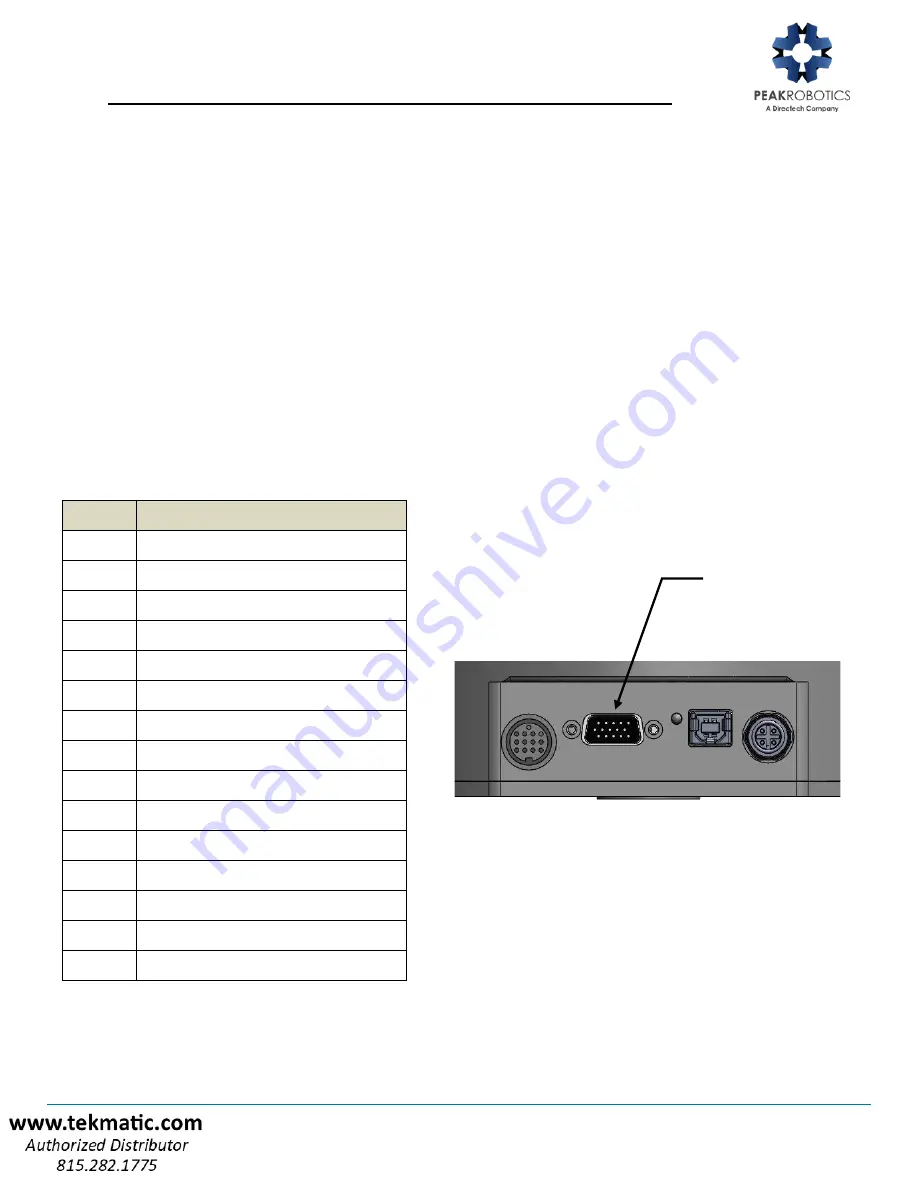
14.2 All User I/O are accessed via the female high-density 15-pin d-sub Auxiliary connector on the
Shoulder connector panel. The Barcode Reader uses this connector, so it will be necessary to
build a splitter cable that plugs into the Auxiliary connector on one end (Norcomp 180-015-
103L001 or equivalent) and into the Barcode Reader cable on the other end (Norcomp 180-015-
203L001 or equivalent). This splitter cable will need to pass through the three lines specific to
the Barcode Reader (BCR, listed below).
14.3 The following I/O are available on the Auxiliary connector:
•
3 digital inputs (non-opto-isolated and sinking, each has a 10k inline resistor, and can be
used with 24VDC PNP sensors)
•
2 analog inputs, 12-bit resolution
•
3 digital outputs (non-opto-isolated, sourcing)
•
+24VDC source (1A max. with servo gripper, 2A without)
Shoulder AUX Connector
AUX PIN FUNCTION
1
Shoulder AN1+, +/-10V
2
Shoulder OUT2, 5V/10mA MAX
3
Shoulder IN3
4
Shoulder IN1
5
+24VDC OUT, 1A MAX
6
Shoulder AN1- (Use with AN1+)
7
Shoulder OUT3, 3.3V/8mA MAX
8
Shoulder OUT1, 5V/10mA MAX
9
Shoulder IN2
10
0VDC (used by BCR)
11
BCR Tx
12
BCR Rx
13
Shoulder AN2, 0-3V
14
Reserved (Shoulder OUT4)
15
Reserved (Rail Decel)
AUX
Connector
Summary of Contents for PEAKROBOTICS KX-2
Page 2: ......






































































