




























8
français
3
Structure et fonction (suite)
3.2
Fonction
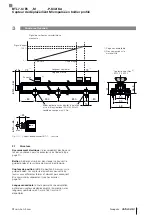
Le capteur de déplacement BTL7 abrite le guide d’ondes
protégé par un boîtier en aluminium. Un capteur de
position se déplace le long du guide d’ondes. Le capteur
de position est relié à l’élément de l’installation dont la
position doit être déterminée.
Le capteur de position définit la position à mesurer sur le
guide d’ondes.
Une impulsion initiale générée en interne déclenche,
conjointement avec le champ magnétique du capteur de
position, une onde de torsion dans le guide d’ondes, qui
se forme par magnétostriction et se propage à vitesse
ultrasonique.
L’onde de torsion se propageant jusqu’à l’extrémité du
guide d’ondes est absorbée dans la zone
d’amortissement. L’onde de torsion au début du guide
d’ondes génère un signal électrique dans une bobine
réceptrice. La position est déterminée d’après la durée de
propagation de l’onde. Selon le modèle, elle sera
caractérisée par des valeurs de tension ou de courant
électrique croissantes ou decroissantes.
Pour les valeurs d’analyse, il est possible de choisir les
fonctions suivantes :
– Position
– Vélocité (avec ou sans signe)
Il n’est possible de configurer l’ensemble des
fonctions qu’à l’aide du logiciel PC « Micropulse
Configuration Tool ». Pour cela, il convient de
raccorder le module de communication USB
3.3
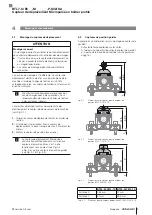
Affichage à LED
Fig. 3-2 : Affichages à LED du BTL7
En fonctionnement normal, la LED 1 indique
l’état de fonctionnement du capteur de
déplacement.
LED 1 LED 2
Etat de fonctionnement
Vert
Eteinte
Fonctionnement normal
Le capteur de position est dans les
limites.
Rouge
Eteinte
Erreur
Pas de capteur de position ou capteur
de position hors limites.
Verte
ou
rouge
Vert
clignotant
Mode programmation
LED 2
LED 1
BTL7-C/E5_ _-M _ _ _ _ -P-S32/KA _ _
Capteur de déplacement Micropulse en boîtier profilé
Summary of Contents for BTL7-C/E508-M Series
Page 2: ...www balluff com...
Page 25: ...www balluff com...
Page 48: ...www balluff com...
Page 71: ...www balluff com...
Page 94: ...www balluff com...







































































