Preliminary Technical
Data
Rev. PrA | Page 6 of 82
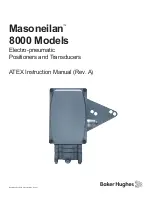
Figure 5. ADRV9029 DPD Actuator Functional Diagram
DPD Half Band Filters
There are two Half Band filters that could be enabled based on the input data rate and the desired DPD actuator rate. The half
band filters have two important characteristics: the passband and stopband ripples are the same; and the passband-edge and
stopband-edge frequencies are equidistant from the half band frequency Fs/4.
Each DPD half-band filter provides either 1× or 2× interpolation rate. A maximum of 4× interpolation can be achieved by
cascading two DPD HB filters. DPD half-band 1 supports a bandwidth of approximately 82% with respect to input data rate. For
example, DPD-HB1 supports a 100 MHz Bandwidth signal at a 122.88 MSPS input rate. DPD half-band 2 supports a bandwidth of
approximately 41% with respect to input data rate. For example, DPD-HB2 supports a 100 MHz bandwidth signal at a 245.76
MSPS input rate. These two characteristics of half band filters can be seen in
Figure
(2× interpolation) and Figure 7 (4× interpolation).
Figure
6
. Response for Half Band 1 Enabled (x2): 82% of Fs