5
#L010155
July 2004
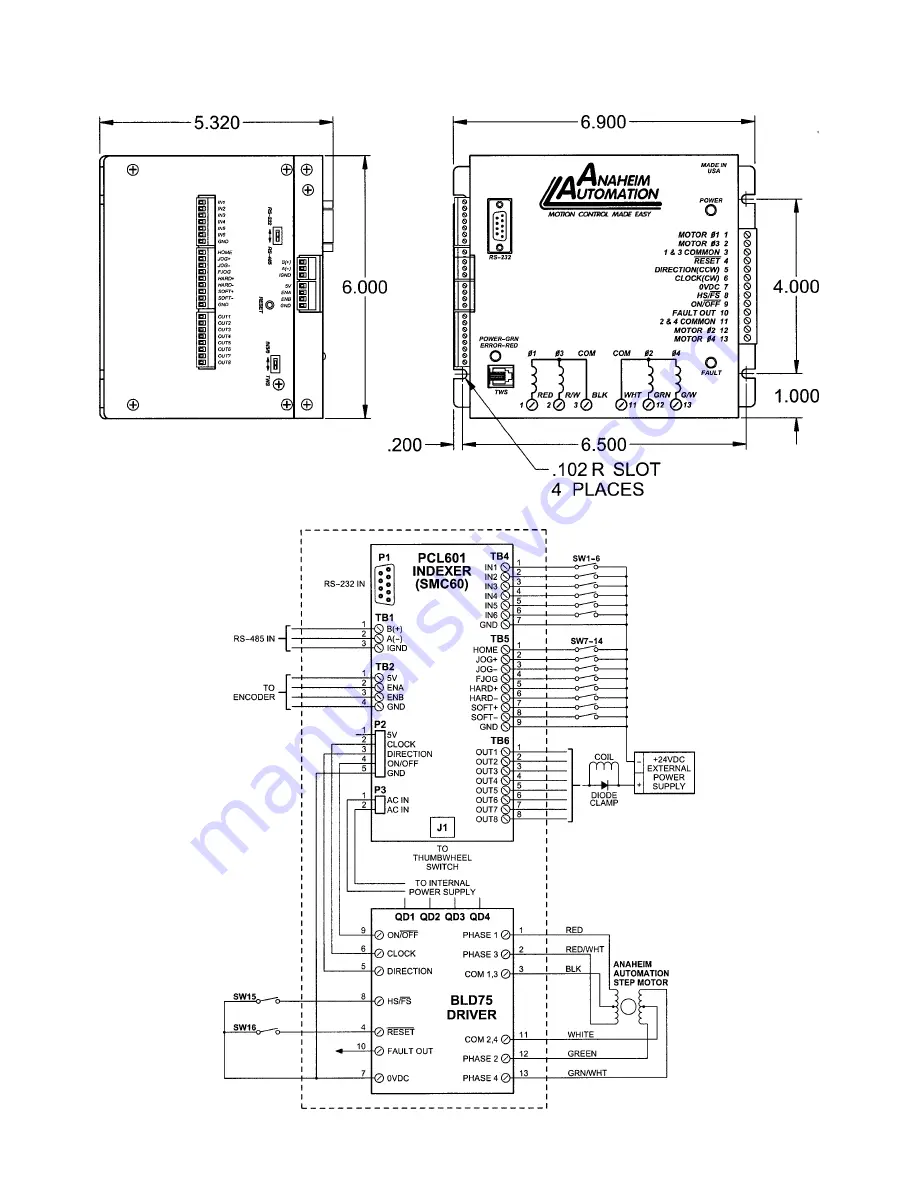
Dimensions/Switch Locations
Wiring Diagrams
Page 1: ...Guide User s Guide User s Guide User s Guide User s Guide 910 East Orangefair Lane Anaheim CA 92801 e mail info anaheimautomation com 714 992 6990 fax 714 992 0471 website www anaheimautomation com A...
Page 2: ...60WIN Software Section 4 SMC60WIN Software Section 4 SMC60WIN Software Section 4 SMC60WIN Software 16 16 16 16 16 File Menu 17 Setup Menu 17 Setup Axis Menu 17 Program Menu 18 Program Autostart Progra...
Page 3: ...PD75601 offers half step or full step operation to move the motor 0 9 or 1 8 degrees per step The controller in the DPD75601 PCL601 provides independent programming of acceleration deceleration base s...
Page 4: ...mable I O and fault out Outputs 8 programmable I O and fault out Outputs 8 programmable I O and fault out Outputs 8 programmable I O and fault out Outputs 8 programmable I O and fault out Open Drain T...
Page 5: ...Dimensions Switch Locations Dimensions Switch Locations Dimensions Switch Locations Dimensions Switch Locations Dimensions Switch Locations Wiring Diagrams Wiring Diagrams Wiring Diagrams Wiring Diagr...
Page 6: ...i t c e n n o C r o t o M d n a s t u p n I r e v i r D n o i t p i r c s e D 1 1 e s a h P r o t o M 2 3 e s a h P r o t o M 3 3 1 n o m m o C r o t o M 4 t e s e R t l u a F 5 t u p t u o n o i t c...
Page 7: ...r Terminal Descriptions Controller Terminal Descriptions Controller Terminal Descriptions Controller n o i t i s o P 5 8 4 S R n o i t p i r c s e D 1 A 2 B 3 d n u o r g d e t a l o s i n a s i s i h...
Page 8: ...t pin goes low This output is able to stand off 50V and sink 50mA Refer to the table below for LED fault indications If a fault occurs reset the fault by applying a logic 0 to the Reset Fault Input pi...
Page 9: ...rmer is too low to provide the amount of current needed by the low voltage winding Check the input voltage of the transformer to see if the voltage is within the specified range Over Temperature Five...
Page 10: ...ernally connected inside the DPD75601 The signal line maintains levels of 5VDC to 15VDC and 5VDC to 15VDC For a valid logic level in the controller the voltage must be at least 3 volts RS232 works at...
Page 11: ...to address up to 99 DPD75601 s from one port The Default axis is 0 To change the axis use the SMC60WIN software or the command To verify or check the axis use the SMC60WIN software or the command The...
Page 12: ...k for any type of motion command These limits are directional NOTE Whenever a soft limit switch is activated the motor will decelerate and run at base speed during an indexing move or stop during a sl...
Page 13: ...um speed of the motor To set the position To set the position To set the position To set the position To set the position when told via the goto analog position command the input will read a voltage b...
Page 14: ...ts If Then Statements The if then statements are conditional based on the values preset in the program The user can either test each individual input or all inputs at once If the input or input regist...
Page 15: ...the TWS position or the thumbwheel will be disabled Acceleration Deceleration Acceleration Deceleration Acceleration Deceleration Acceleration Deceleration Acceleration Deceleration The acceleration...
Page 16: ...XP Installation Windows 95 98 NT ME 2000 XP Installation Windows 95 98 NT ME 2000 XP Installation Windows 95 98 NT ME 2000 XP Installation Option 1 1 Insert the CD into the drive 2 On the Windows Tas...
Page 17: ...Menu C t c e n n o r e l l o r t n o c e h t h t i w s n o i t a c i n u m m o c h s i l b a t s E D t c e n n o c s i e s u o t s e c i v e d r e h t o r o f t r o p M O C e h t e s a e l e R m o C...
Page 18: ...m Menu D e l b a s i p u r e w o p t a m a r g o r p d e r o t s a f o n o i t u c e x e e h t e l b a s i d l l i w m a r g o r P E e l b a n p u d e r e w o p s i r e l l o r t n o c n e h w n o i t...
Page 19: ...not established please refer to the Troubleshooting Section H H H H Help Menu elp Menu elp Menu elp Menu elp Menu E r e d a e R r e d o C r o r r r e l l o r t n o c 1 0 6 5 7 D P D e h t y b d e t a...
Page 20: ...l u c l a c p o t k s e d e h t n e p O l l A p o t S g n i n n u r m o r f n o i t o m l l a d n a m a r g o r p e h t p o t S t c e n n o C r e l l o r t n o c e h t h t i w n o i t a c i n u m m o...
Page 21: ...u e m o H s e h c t i w S e m o H d n a t f o S w o l s l l i w r o t o m t u b h c t i w s e m o h s d r a w o t g n i v o m y b n o i t i s o p e m o h e h t k e e s l l i w r o t o M e m o h e h t...
Page 22: ...b e k a t o t s p e t s f o d n e S s t n u o C t u p t u O f o t e S r e l l o r t n o c e h t o t s t n u o c t u p t u o f o d n e S s p e t S f o e v o M d e r e t n e s p e t s f o r e b m u n e...
Page 23: ...r e l l o r t n o c e h t o t t i m i l r e p p u n o i t i s o p g o l a n a e h t d n e S n o i t i s o P g o l a n A t e S t u p n i t a d e r u s a e m e g a t l o v g o l a n a n o d e s a b n o...
Page 24: ...Create and Edit Program r e l l o r t n o C o t m a r g o r P d n e S r e l l o r t n o c e h t o t m a r g o r p t n e r r u c d n e S r e l l o r t n o C n i m a r g o r P w e i V y r o m e m r e l...
Page 25: ...r t n o c d n a s r e t e m a r a p r e d o c n e t x e T d n a n o i t a r s i g e R g o l a n A s d n a m m o C s t i m i l n o i t i s o p d n a d e e p s g o l a n a r o f s r e t e m a r a p r e...
Page 26: ...e g n a h c o t r e s u s w o l l A e v o M h s i n i F t x e n e h t o t g n i u n i t n o c e r o f e b d e t e l p m o c e b o t d n a m m o c n o i t o m y n a w o l l a l l i w d n a m m o C d n...
Page 27: ...t x e n e h t h c t a m t o n o d s t u p n i e h t f I e u l a v n e v i g e h t h c t a m d e r e g g i r t e t u c e x e n e h t s e h c t a m t u p n i f I p i k s e s i w r e h t o e n i l t x e...
Page 28: ...t e l b a s i d l l i w d n a m m o C n O x e d n I l e e h w b m u h T e h t n i e b t s u m 2 h c t i w S x e d n i l e e h w b m u h t e h t e s u o t r e s u e h t s w o l l a d n a m m o C d e l...
Page 29: ...l i w r o t o M t i m i L r e w o L n o i t i s o P g o l a n A g o l a n a e h t s t e S n o i t i s o p d e i f i c e p s e u l a v e h t o t t i m i l r e w o l t i m i L r e p p U n o i t i s o P...
Page 30: ...P P S P R d n o c e s r e p s e s l u p o t d n o c e s r e p n o i t u l o v e r m o r f t r e v n o C v e R r e P s p e t S v e r p e t s 0 0 2 a r o f s i t l u a f e d e h T r o t o m p e t s e h...
Page 31: ...a response from a unit 0 Carriage Return After the command the DPD75601 will return a SMC60 the current revision number Note In direct talk mode each command is followed by a carriage return The unit...
Page 32: ...turns on during an output on the fly move If only one output turn on is needed set this value to 0 This command is used in conjunction with the output on the fly enabled command Range 0 65535 D 1st Ou...
Page 33: ...motor the motor ratio is 1000 4 400 10 This command is used in conjunction with the encoder autocorrect EA command Range 1 255 ER Encoder retries ER Encoder retries ER Encoder retries ER Encoder retr...
Page 34: ...irections and run at base speed unit the release of the home limit input The ramp profile is specified by the B base speed M max speed and A acceleration deceleration commands I Read inputs I Read inp...
Page 35: ...clocks for the DPD75601 to send out following a G command It is also used to set the registration index during and index on the fly move Motion is not activated by this command it only sets the index...
Page 36: ...on with the analog position the analog position lower limit and the analog position lower limit commands S Go slew S Go slew S Go slew S Go slew S Go slew Format S Description This command will send c...
Page 37: ...r e V T f f o s i 0 n o s i 1 t n e r r u c r o t o m y f i r e V B d e e p s e s a b y f i r e V Z n o i t i s o p y f i r e V C y l f e h t n o s t u p t u o n e e w t e b s p e t s y f i r e V d e...
Page 38: ...use a 1 To disable the function use a 0 This command is used in conjunction with the number of steps between outputs C 1st output position D and number of outputs commands Clockwise Clockwise Clockwis...
Page 39: ...led Analog speed enabled Format 0 or 1 Description This command will either enable or disable input 1 to be used to set the analog speed To enable the function use a 1 To disable the function use a 0...
Page 40: ...calculation following a P command for the analog position input This command is used in conjunction with the analog position enable and absolute position P commands Range 0 65535 Analog position upper...
Page 41: ...01 1195 Anaheim CA 92801 1195 Anaheim CA 92801 1195 Anaheim CA 92801 1195 phone 714 992 6990 phone 714 992 6990 phone 714 992 6990 phone 714 992 6990 phone 714 992 6990 fax 714 992 0471 fax 714 992 04...
Page 42: ...e h t o e l i h w e d o m t c e r i d n i d o o g e r a s d n a m m o c 2 1 5 o r e Z s r e t e m a r a P r o r r E r e l l o r t n o c e h t o t t n e s s a w d n a m m o c A r e l l o r t n o c e h...
Page 43: ...1 Sample Program 1 Sample Program 1 Sample Program 1 Sample Program 1 Sample Program 1 illustrates a typical application where a system moves to a specific position required The sample program shows h...
Page 44: ...ustrates a typical application where a system is first sent home to a datum or 0 position This sample program shows how a motor will move to 3 different positions utilizing some of the motion commands...
Page 45: ...first homed using home type 0 waits for input 1 to be a value of 0 grounded and then is indexed 10 000 steps During this index output 1 needs to be turned on every 1000 steps 5 times starting at posit...
Page 46: ...put 3 is low all other inputs are not used and input 1 is masked high due to the analog function being used The third step is to slew using the analog input as the maximum speed between 5000 and 10000...
Page 47: ...abling Axis 0 and Axis 1 to use the thumbwheel switch that is connected to each unit for indexing The direction is then set for Axis 0 and Axis 1 and these two axes are then told to index the distance...
Page 48: ...B 2 6 6 3 P 0 5 C 2 7 7 3 Q 1 5 D 2 8 8 3 R 2 5 E 2 9 9 3 S 3 5 A 3 A 1 4 T 4 5 B 3 B 2 4 U 5 5 0 4 C 3 4 V 6 5 B 5 D 4 4 W 7 5 D 5 E 5 4 X 8 5 E 5 F 6 4 Y 9 5 B 7 G 7 4 Z A 5 D 7 H 8 4 n r u t e R e...
Page 49: ...use or inability to use the product or documentation Limited Warranty All Anaheim Automation Inc products are warranted against defects in workmanship materials and construction when used under Normal...