





























AgileX Robotics (Dongguan) Co.,Ltd.
16
0x01
0x00
0x0a
0x00
0x00
0x00
0x00
0x44
2. The vehicle rotates at 0.07853rad/s.
byte [0]
byte [1]
byte [2]
byte [3]
byte [4]
byte [5]
byte [6]
byte [7]
0x01
0x00
0x00
0x0a
0x00
0x00
0x00
0x44
3. When the vehicle stays still, switch the control mode to command mode (test without RC
transmitter switched on)
byte [0]
byte [1]
byte [2]
byte [3]
byte [4]
byte [5]
byte [6]
byte [7]
0x01
0x00
0x00
0x00
0x00
0x00
0x00
0x3a
The chassis status information will be fed back; what’s more, the information about motor current,
encoder and temperature are also included. The following feedback frame contains the information
about motor current, encoder and motor temperature:
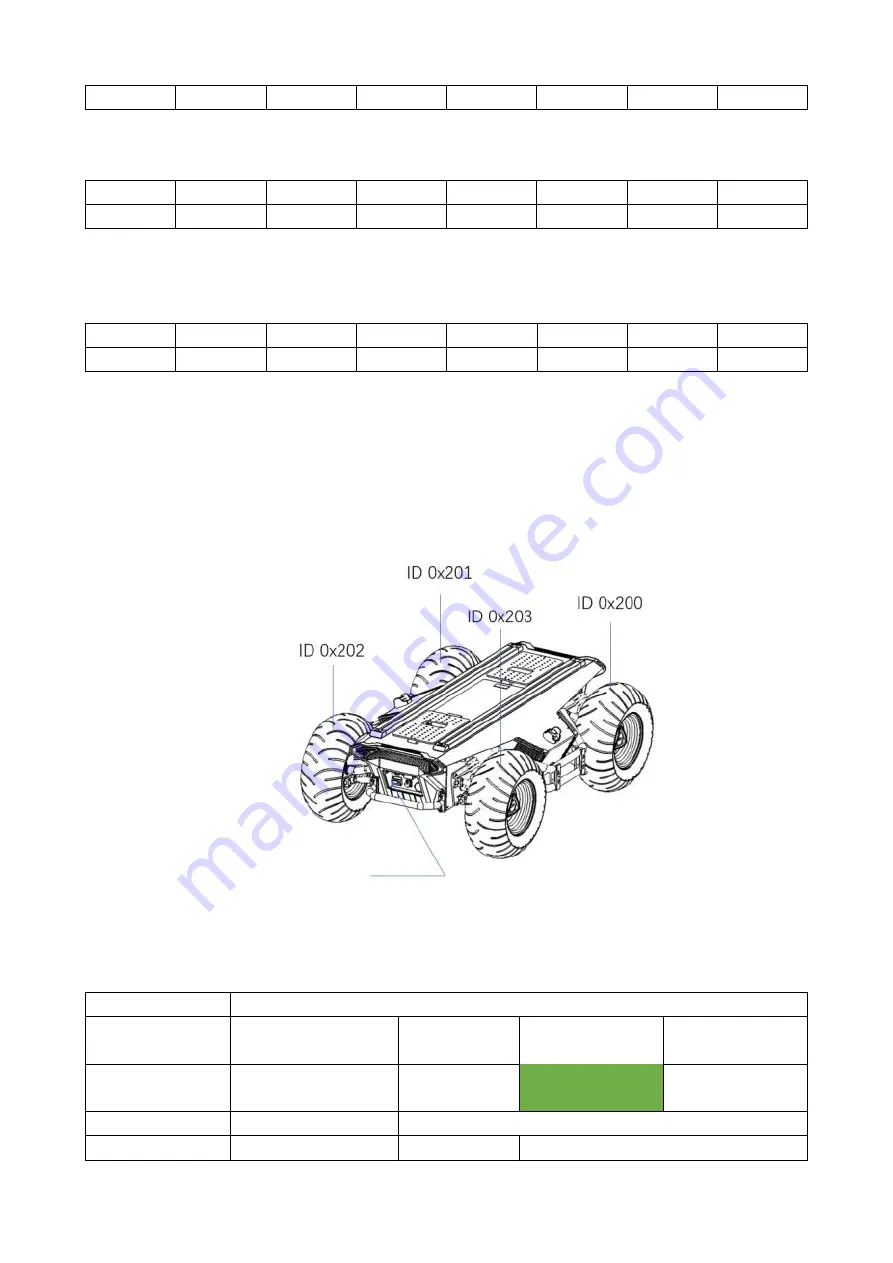
The serial numbers of 4 motors in the chassis are shown in the figure below:
Figure 3.0 Schematic Diagram of Motor Feedback IDs
Table 3.5 No.1 Motor Information Feedback
Command Name
No.1 Motor Drive Information Feedback Frame
Sending node
Receiving node
ID
Cycle (ms)
Receive-timeout
(ms)
Steer-by-wire
chassis
Decision-making
control unit
0x200
20ms
None
Data length
0x08
Position
Function
Data type
Description
Rear Panel





















































