
























Industrial
Electronic Devices
ADFweb.com S.r.l.
User Manual
EtherCAT Master / CANopen
Document code: MN67E58_ENG Revision 1.000 Page 10 of 31
ETHERCAT
EtherCAT
(Ethernet for Control Automation Technology) is an Ethernet-based fieldbus system, invented by Beckhoff Automation.
The protocol is standardized in IEC 61158 and is suitable for both hard and soft real-time computing requirements in automation technology.
With EtherCAT, the standard Ethernet packet or frame (according to IEEE 802.3) is no longer received, interpreted, and copied as process
data at every node. The EtherCAT slave devices read the data addressed to them while the telegram passes through the device, processing
data "on the fly". In other words, real-time data and messages are prioritized over more general, less time-sensitive or heavy load data.
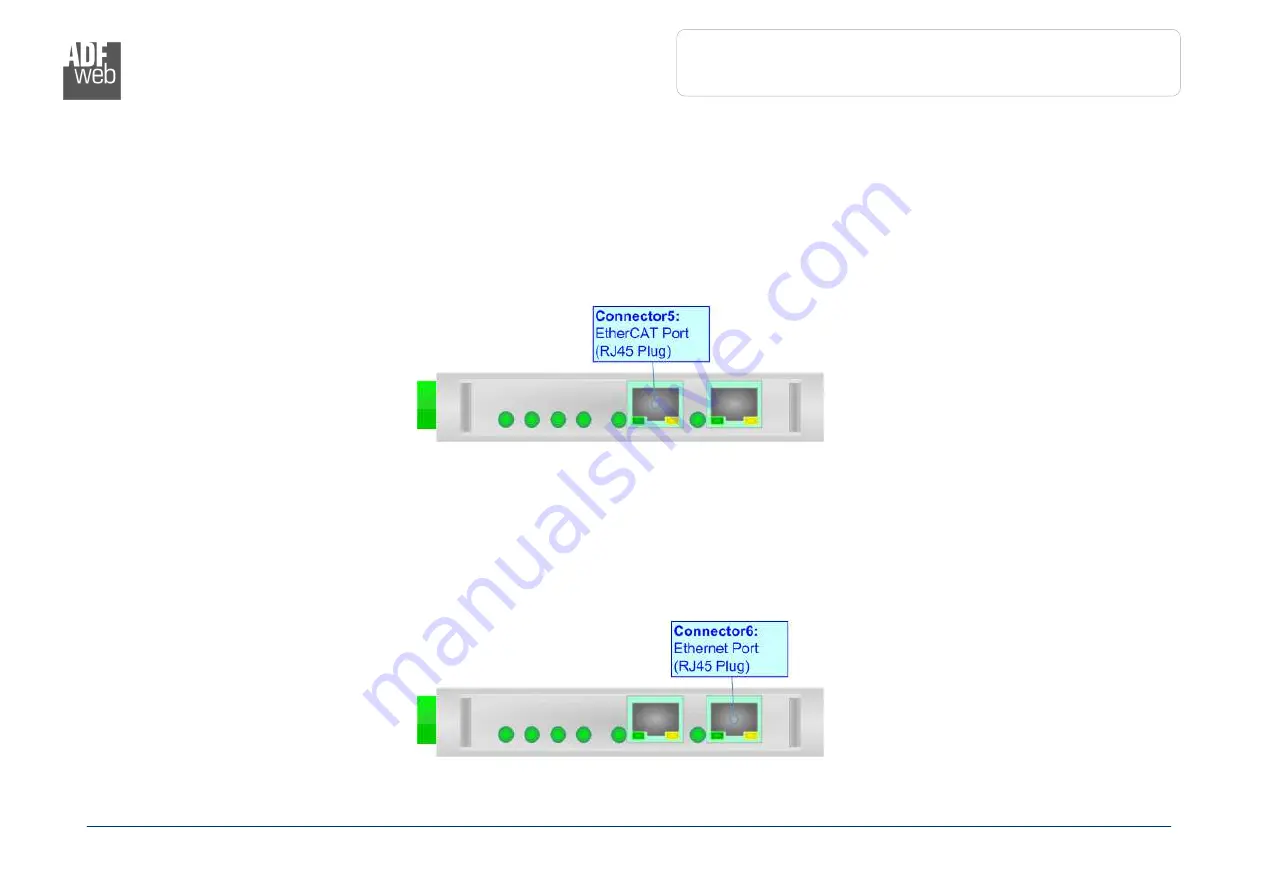
EtherCAT connection must be made using Connector5 of the HD67E58-A1.
ETHERNET:
The updating of the converter must be made using Connector6 of the HD67E58-A1 with at least a Category 5E cable. The maximum length
of the cable should not exceed 100m. The cable has to conform to the T568 norms relative to connections in cat.5 up to 100 Mbps. To
connect the device to an Hub/Switch is recommended the use of a straight cable, to connect the device to a PC/PLC/other is recommended
the use of a cross cable.







































































