





























Chapter 3: MotionBlox-60R
Adept Viper s650/s850 Robot with MB-60R/eMB-60R User’s Guide, Rev F
Page 36 of 100
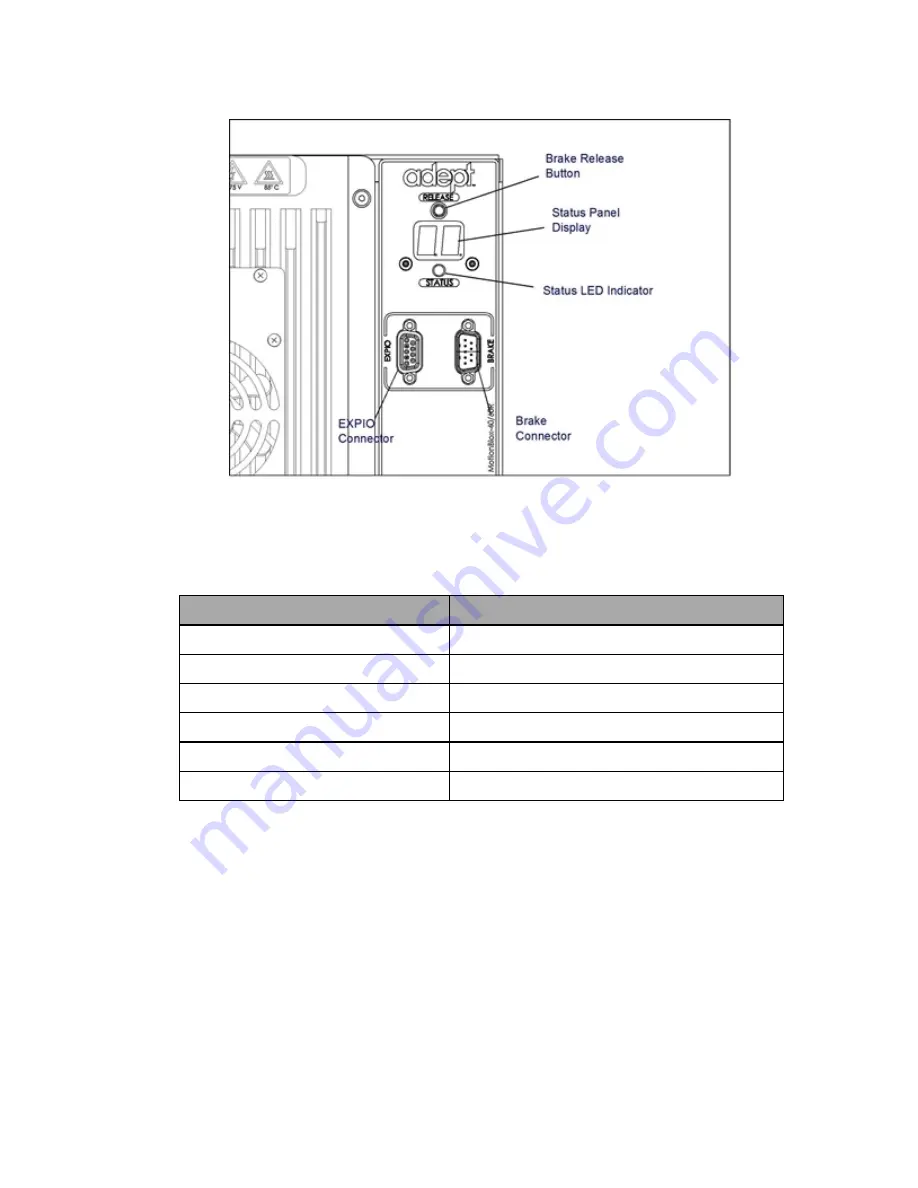
Figure 3-4. Controls and Indicators on MB-60R/eMB-60R
Table 3-2. Status LED Definition
LED Status
Description
Off
24 VDC not present
Green, Slow Blink
High Power Disabled
Green, Fast Blink
High Power Enabled
Green/Red Blink
Selected Configuration Node
Red, Fast Blink
Fault - refer to the following table
Solid Green or Red
Initialization or Robot Fault
Status Panel
The status panel, shown in the preceding figure, displays alpha-numeric codes that indicate
the operating status of the MB-60R/eMB-60R, including detailed fault codes. The following
table gives definitions of the fault codes. These codes provide details for quickly isolating prob-
lems during troubleshooting.
Summary of Contents for eMB-60R
Page 1: ...Adept Viper s650 s850 Robot with MB 60R eMB 60R User s Guide...
Page 2: ......
Page 62: ......
Page 70: ......
Page 82: ......
Page 92: ......
Page 98: ......
Page 99: ......
Page 100: ...P N 05173 060 Rev F 5960 Inglewood Drive Pleasanton CA 94588 925 245 3400...







































































