





























Activ
Media Robotics
Similarly, this Linux
xterm
command uploads a fresh copy of AROS to your robot’s H8S-
based microcontroller and then exits, much like the simple
dl_AROS1_0
program:
% ./AROScf –d AROS1_0.hex –n -b
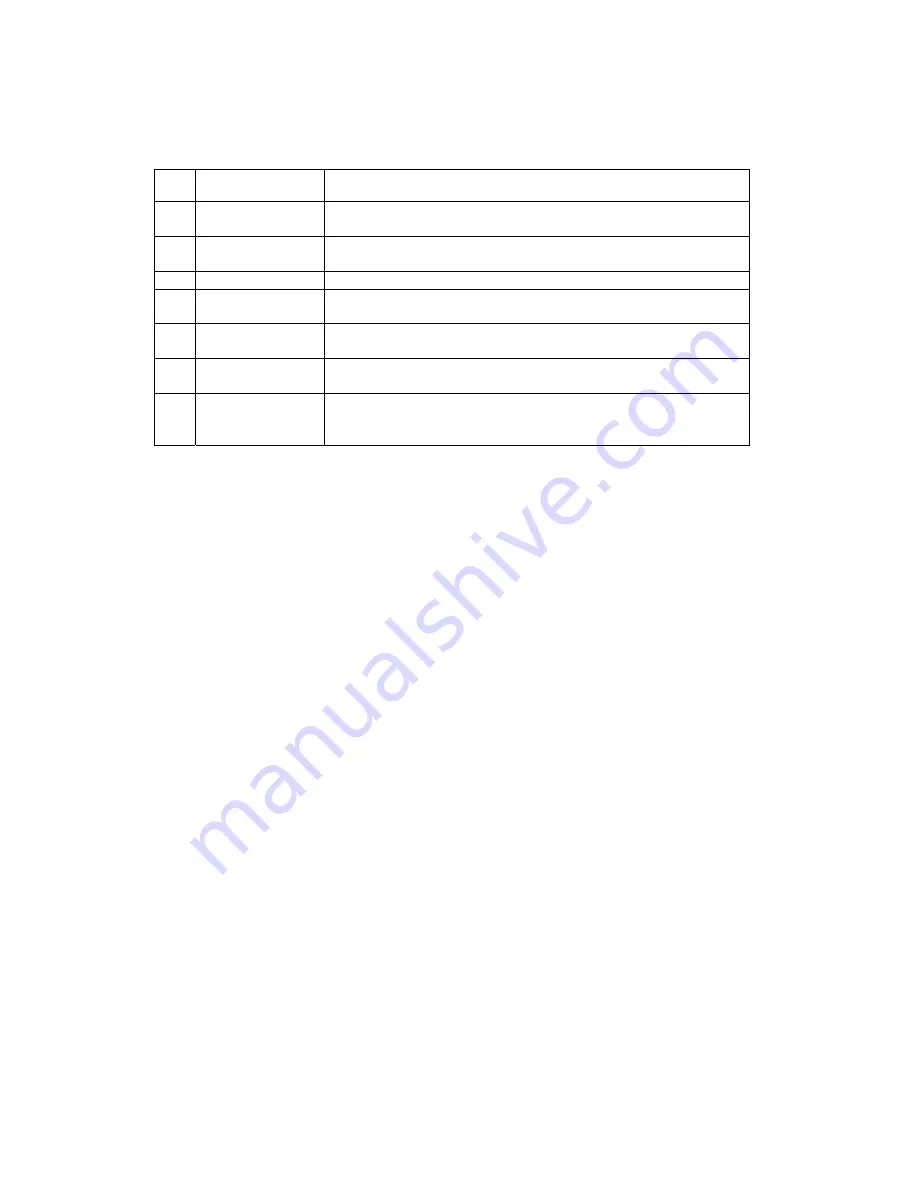
Table 14. AROScf startup options
KEY
ARGUMENT
DESCRIPTION
-b command
arguments
Batch mode executes list of AROScf
Interactive mode commands with arguments
-d hexfile
Automatically upload AROS hex image file
after connecting with the microcontroller
-h none
Print help message and exit
-l paramsfile
Load the disk-stored parameter file instead
of the robot’s copy
-n none
Don’t automatically connect with
microcontroller
-p serial-
device
Uses specified serial port for connection
-s paramsfile
On exit from AROScf, automatically save the
current parameter values to the named
paramsfile
C
ONFIGURING
AROS O
PERATING
P
ARAMETERS
Your
Activ
Media robot has several parameters stored in FLASH that AROS uses to
configure its servers and auxiliary attachments and to uniquely identify your robot. For
instance, the default maximum translational velocity is stored in the
TransVelMax
parameter. Its value takes effect when starting your robot or after resetting the
microcontroller, and may be changed temporarily by a client command. Use AROScf’s
Interactive Mode to modify these operating parameters, and hence your robot’s default
operating characteristics.
Start up AROScf as described in the previous section. As discussed earlier, AROScf
normally downloads the set of operating parameters from your robot’s FLASH for your
review and modification. Or you may load a disk-stored version of those parameters.
Some of the parameters, "Constants", are not to be changed. The others, "Variables",
are the identifying and operating parameters that you may edit.
Interactive Commands
To operate AROScf in interactive mode, simply type a keyword at the command line.
Some keywords affect the operation of AROScf, the status of the parameters file as a
whole, or the connection between AROScf and your robot’s microcontroller. For
instance, to review the list of current AROS constants or variables, type
'
c
'
or
'
v
'
,
respectively, followed by a return (
Enter
). Similarly, type '
?
' or
'help'
to see a list of
AROScf interactive commands.
Changing Parameters
Other keywords refer to the operating parameters themselves. Alone, a parameter’s
keyword simply asks AROScf to display the parameter’s value. Provide an argument with
the parameter keyword separated by a space to change its value. That value may be a
string (no quotes or spaces) or a decimal or hexadecimal ("
0xN
") number. For example,
to change the
watchdog
timeout to four seconds, type:
> watchdog 4000
or
53
































































