





























INS401 User’s Manual
_____________________________________________________________________________________
Doc# 7430-3305-08
Page 14
9.
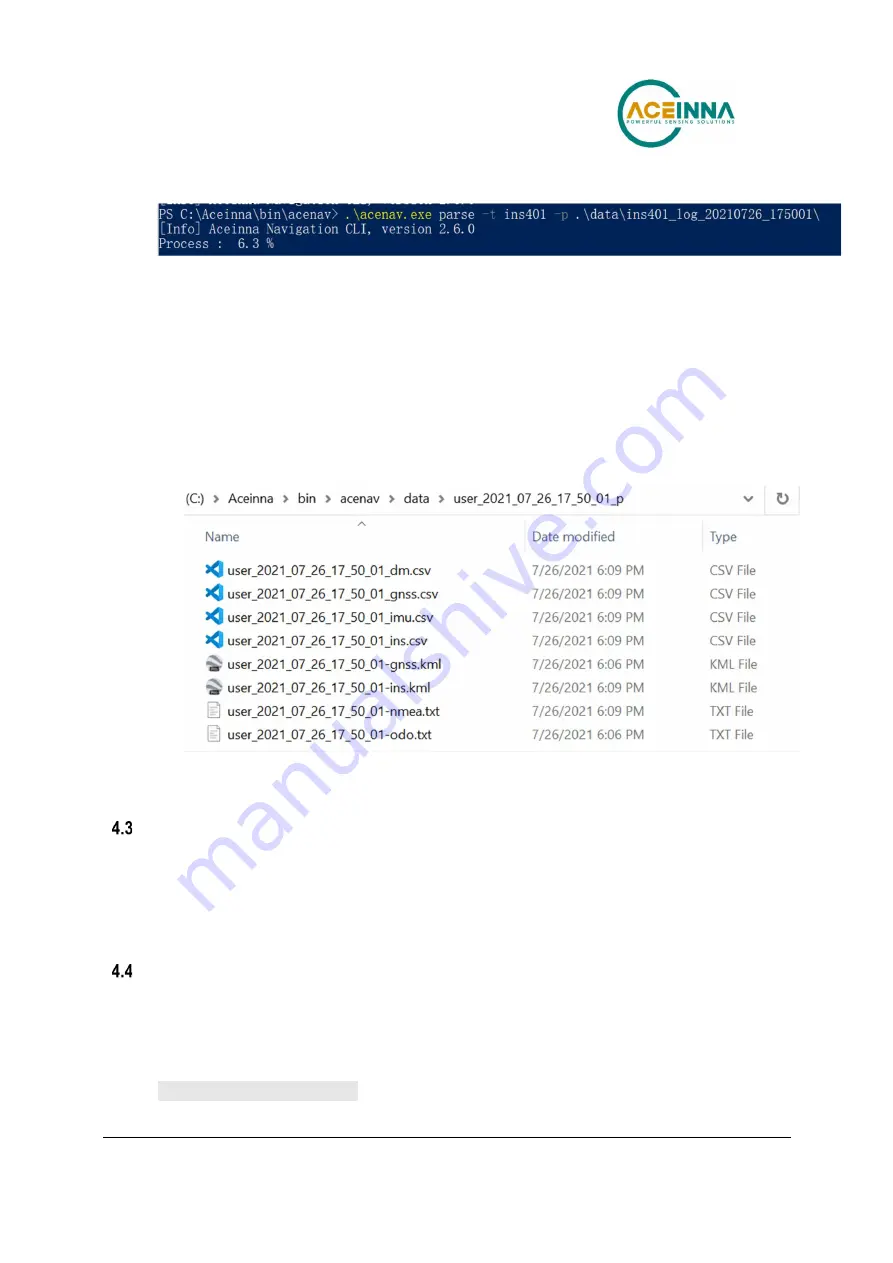
Run the data parsing command
10.
Check the decoded files for results representation and analysis
user_<time_tag>_dm.csv
: INS401 system diagnostic messages
user_<time_tag>_gnss.csv
: GNSS solution at 1 Hz
user_<time_tag>_imu.csv
: raw IMU data at 100 Hz
user_<time_tag>_ins.csv
: INS solution at 100 Hz
user_<time_tag>_gnss.kml
: GNSS solution trajectory in kml format for Google
Earth presentation
user_<time_tag>_ins.kml
: INS solution trajectory in kml format for Google Earth
presentation
user_<time_tag>_nmea.text
: GNSS solution in NMEA 0183 ASCII strings
user_<time_tag>_odo.text
: vehicle odometer speed data received by INS401
Refer to Appendix B: AceNav CLI Software Usage for a detailed description and the usage of
the “AceNav” CLI.
RTK Corrections
As stated in the overview, for optimal performance, it is necessary to enable RTK corrections.
The performance is related to the distance between the rover and the base station (ideally 20 km
or less). The error increases according to the factor of 1 ppm times the baseline length. Refer to
chapter 6 Ethernet Port and Messages section 6.5 Input Binary Packets for more information
about RTCM messages and Table 7 for base RTCM data packet.
Odometer
As stated in the overview, for optimal performance, it is necessary to provide the odometer input
to the INS401. Refer to chapter 6 Ethernet Port and Messages section 6.5 Input Binary Packets
for more information about the vehicle reference point and Table 8 for vehicle speed data packet.
For optimal performance, it is recommended for the odometer to meet the following requirements:
-
Sampling period of 10±3 ms







































































