





























4 Repair
4.6.8. Replacement of motor, axis 6, IRB 6640ID
3HAC026876-001 Revision: C
344
© Copyri
ght
200
6-2008 ABB.
All rights reserved.
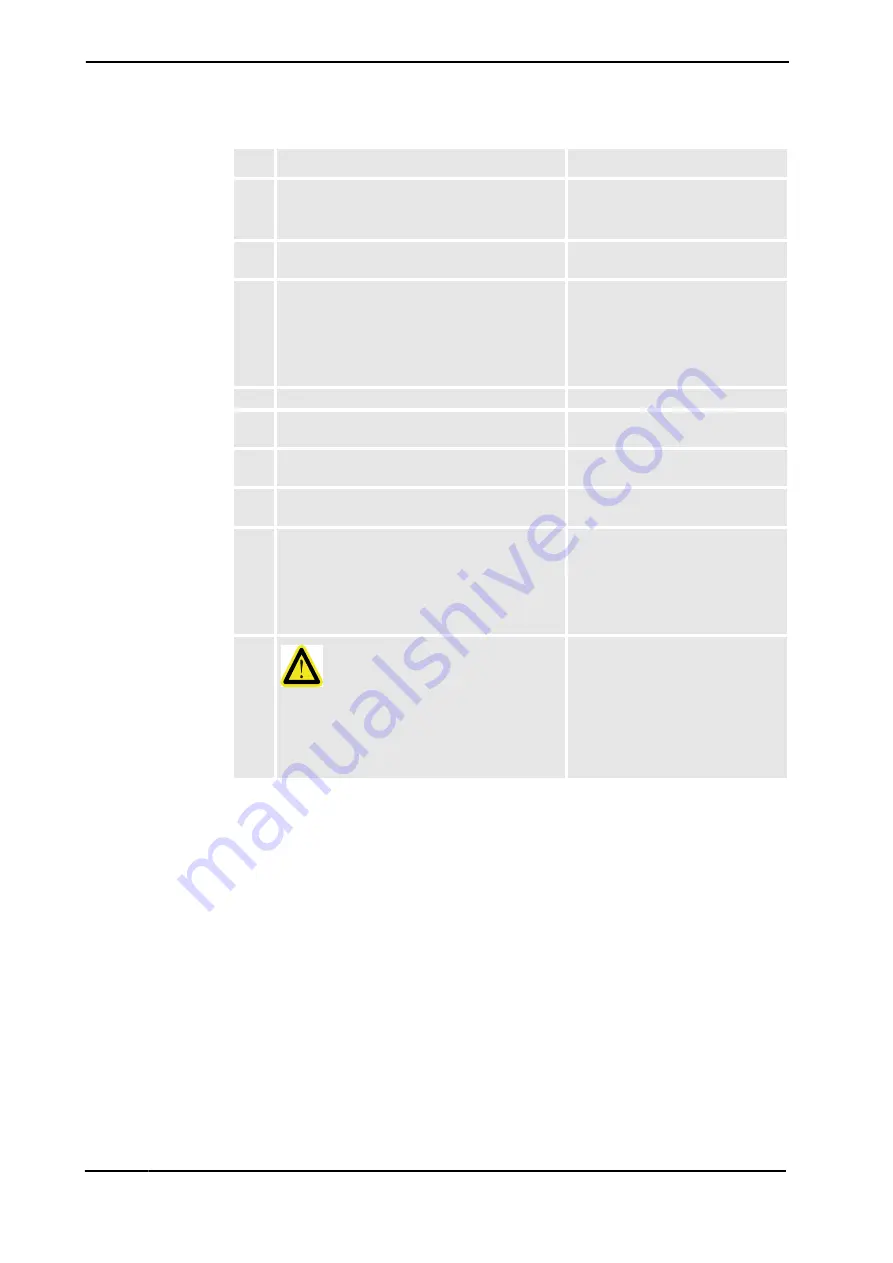
3. In order to release the brakes, connect the 24
VDC power supply to the motor.
Connect to connector R3.MP6:
•
+ : pin C
•
- : pin D
4. Fit the motor, making sure the motor pinion is
properly mated into the gear of axis 6.
5. Secure the motor with its three attachment
screws and washers.
3 pcs, M8x25. Tightening torque: 24
Nm.
Dimensions of the tools are
specified in the figure
tools, motor attachment screws on
page 334
.
6. Disconnect the brake release voltage.
7. Reconnect the motor connectors.
.
8. Perform a leak-down test.
Detailed in section
9. Refill the axis 6 gearbox with oil, if previously
drained.
Detailed in section
10. Recalibrate the robot.
Calibration is detailed in a separate
calibration manual, enclosed with
the calibration tools.
General calibration information is
included in section
Calibration infor-
mation
.
11.
DANGER!
Make sure all safety requirements are met when
performing the first test run. These are further
detailed in section
cause injury or damage! on page 33
.
Action
Note
Continued





































































