





























Program features 67
Notes:
• Actual motor shaft speed is not needed for motor control.
• Vector control also requires measurement of the DC voltage and two motor phase
currents.
The difference of vector control from the traditional control are:
- Torque control operates at the same time level as the power switch control.
- There is no separate voltage and frequency controlled PWM modulator.
- The output stage switching is based on the electromagnetic state of the motor.
- The best motor control accuracy is achieved by activating a separate motor.
identification run (normal ID run).
See also section
(page
Settings
• Main menu
Motor data
or Main menu
Complete parameter list
.
(page
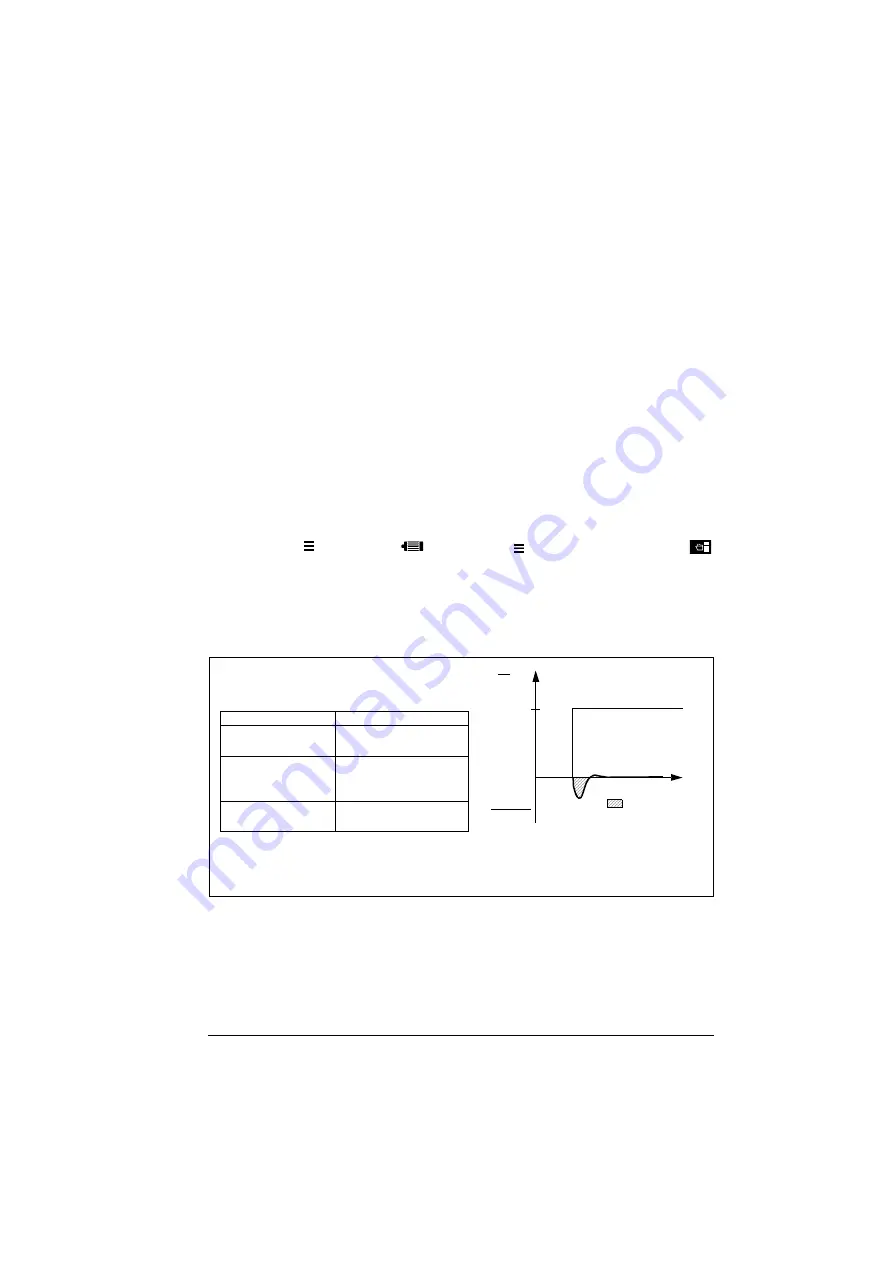
Speed control performance figures
The table below shows typical performance figures for speed control.
100
t
(s)
T
T
N
(%)
T
load
n
act
-n
ref
n
N
Area < 10% s
T
N
= rated motor torque
n
N
= rated motor speed
n
act
= actual speed
n
ref
= speed reference
Speed control
Performance
Static accuracy
20% of motor nominal
slip
Dynamic accuracy
< 10% s with 100%
torque step (with default
speed controller tuning)
Tuned speed
controller
< 2% s with 100%
torque step
Summary of Contents for ACS560
Page 1: ...ABB GENERAL PURPOSE DRIVES ACS560 standard control program Firmware manual...
Page 4: ...4...
Page 30: ...30 Start up control with I O and ID run...
Page 32: ...32 Using the control panel...
Page 100: ...100 Program features...
Page 153: ...Control macros 153...
Page 160: ...160...
Page 374: ...374 Parameters...
Page 408: ...408 Additional parameter data...
Page 466: ...466 Fieldbus control through the embedded fieldbus interface EFB...
Page 504: ...504 Control chain diagrams...
Page 508: ...508 Parameterization with drive composer...
Page 512: ...512 Parameterization with automation builder drive manager...







































































