





























Parameters 349
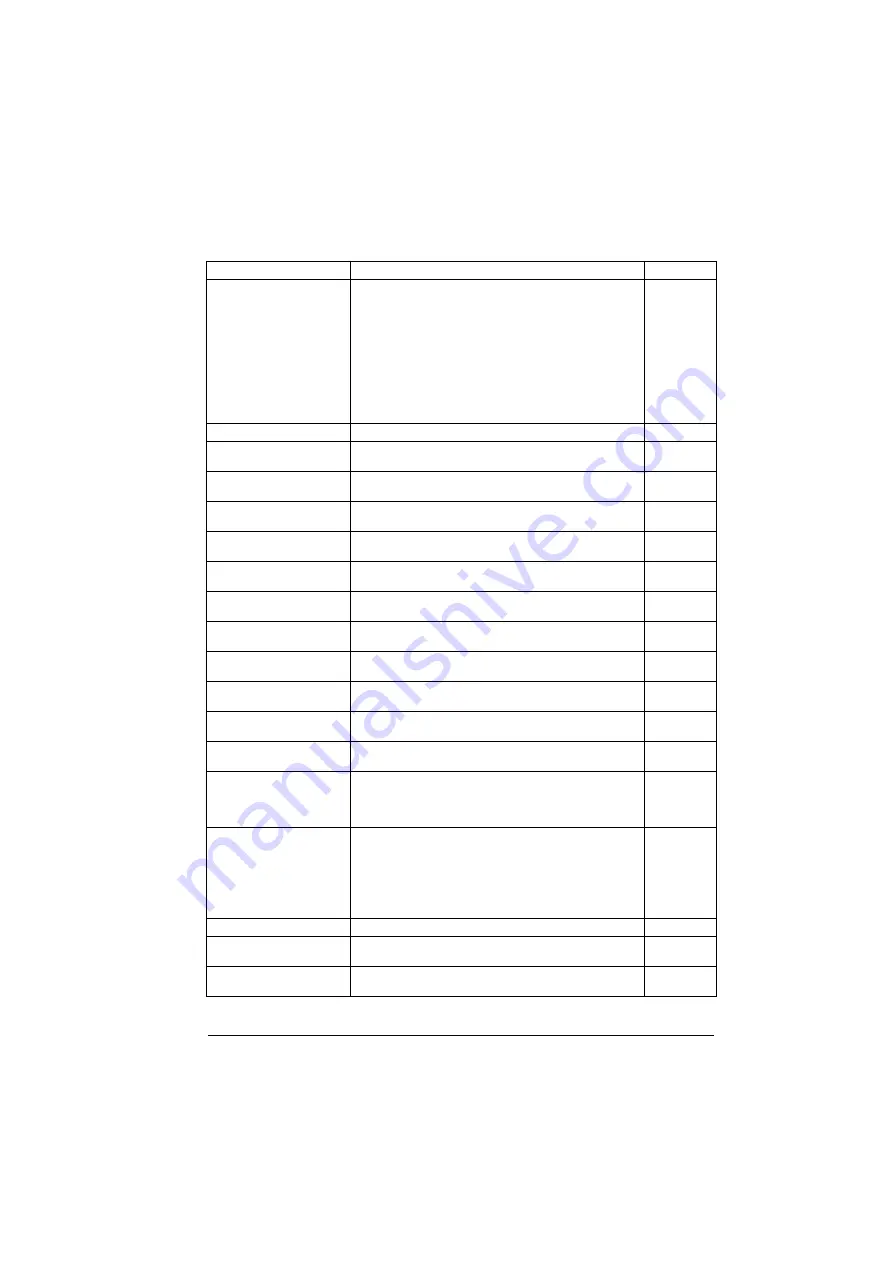
Defines the way the autochange is triggered.
In all cases except
, the start order is moved one
step forward each time the autochange occurs. If the start
order initially is 1-2-3-4, after the first autochange the order
will be 2-3-4-1, etc.
For
, the start order will be determined so that the
running times of all motors remain within the defined limit.
Note:
Autochange only occurs when the speed of the drive is
below the speed defined by parameter
See also section
on page
.
Not selected
Autochange disabled.
0
Selected
Rising edge starts the autochange if autochange conditions
are met.
1
DI1
Autochange triggered by the rising edge of digital input DI1
(
, bit 0).
2
DI2
Autochange triggered by the rising edge of digital input DI2
(
, bit 1).
3
DI3
Autochange triggered by the rising edge of digital input DI3
(
, bit 2).
4
DI4
Autochange triggered by the rising edge of digital input DI4
(
, bit 3).
5
DI5
Autochange triggered by the rising edge of digital input DI5
(
, bit 4).
6
DI6
Autochange triggered by the rising edge of digital input DI6
(
, bit 5).
7
Timed function 1
Autochange triggered by timed function 1 (bit 0 of
(see page
)).
8
Timed function 2
Autochange triggered by timed function 2 (bit 1 of
(see page
)).
9
Timed function 3
Autochange triggered by timed function 3 (bit 2 of
(see page
)).
10
Fixed interval
Autochange is done when the interval determined in the
parameter
has elapsed.
11
All stop
Autochange is done when all the motors are stopped.
The PID sleep feature (parameters
) must be used for the drive to stop
when the process demand is low.
12
Even wear
The running time of the motors are balanced by the drive.
When the difference in running time between the motors with
the least and most running hours exceeds the time defined by
parameter
, the autochange
occurs.
The running hours of the motors can be found in group
PFC maintenance and monitoring
.
13
). -
Specifies the interval that is used in setting
of
parameter
1.00 h
0.00…42949672.95
h
Time.
1 = 1 h
No.
Name/Value
Description
Def/FbEq16
Summary of Contents for ACS560
Page 1: ...ABB GENERAL PURPOSE DRIVES ACS560 standard control program Firmware manual...
Page 4: ...4...
Page 30: ...30 Start up control with I O and ID run...
Page 32: ...32 Using the control panel...
Page 100: ...100 Program features...
Page 153: ...Control macros 153...
Page 160: ...160...
Page 374: ...374 Parameters...
Page 408: ...408 Additional parameter data...
Page 466: ...466 Fieldbus control through the embedded fieldbus interface EFB...
Page 504: ...504 Control chain diagrams...
Page 508: ...508 Parameterization with drive composer...
Page 512: ...512 Parameterization with automation builder drive manager...







































































