




9
5. Example experiments
5.1
Free damped rotary oscillations
•
To determine the logarithmic decrement
Λ
, the
amplitudes are measured and averaged out over
several runs. To do this the left and right deflec-
tions of the torsional pendulum are read off the
scale in two sequences of measurements.
•
The starting point of the pendulum body is located
at +15 or –15 on the scale. Take the readings for
five deflections.
•
From the ratio of the amplitudes we obtain
Λ
us-
ing the following equation
Λ =
In
ϕ
ϕ
n
n+1
n
ϕ
–
ϕ
+
0 –15
–15
–15
–15
15
15
15
15
1 –14.8 –14.8 –14.8 –14.8 14.8 14.8 14.8 14.8
2 –14.4 –14.6 –14.4 –14.6 14.4 14.4 14.6 14.4
3 –14.2 –14.4 –14.0 –14.2 14.0 14.2 14.2 14.0
4 –13.8 –14.0 –13.6 –14.0 13.8 13.8 14.0 13.8
5 –13.6 –13.8 –13.4 –13.6 13.4 13.4 13.6 13.6
n
Ø
ϕ
–
Ø
ϕ
+
Λ
–
Λ
+
0
–15
15
1
–14.8
14.8
0.013
0.013
2
–14.5
14.5
0.02
0.02
3
–14.2
14.1
0.021
0.028
4
–13.8
13.8
0.028
0.022
5
–13.6
13.5
0.015
0.022
•
The average value for
Λ
comes to
Λ
= 0.0202.
•
For the pendulum oscillation period T the follow-
ing is true:
t = n · T
. To measure this, record the
time for 10 oscillations using a stop watch and cal-
culate T.
T
= 1.9 s
•
From these values the damping constant
δ
can be
determined from
δ
=
Λ
/ T.
δ
= 0.0106 s
–1
•
For the natural frequency
ω
the following holds
true
ω
π
δ
=
−
2
T
2
2
ω
= 3.307 Hz
5.2 Free damped rotary oscillations
•
To determine the damping constant
δ
as a func-
tion of the current
Ι
flowing through the electro-
magnets the same experiment is conducted with
an eddy current brake connected at currents of
Ι
= 0.2 A, 0.4 A and 0.6 A.
ΙΙΙΙΙ
= 0.2 A
n
ϕ
–
Ø
ϕ
–
Λ
–
0 –15
–15
–15
–15
–15
1 –13.6
–13.8
–13.8
–13.6 –13.7
0.0906
2 –12.6
–12.8
–12.6
–12.4 –12.6
0.13
3 –11.4
–11.8
–11.6
–11.4 –11.5
0.0913
4 –10.4
–10.6
–10.4
–10.4 –10.5
0.0909
5 9.2
–9.6
–9.6
–9.6 –9.5
0.1
•
For T = 1.9 s and the average value of
Λ
= 0.1006
we obtain the damping constant:
δ
= 0.053 s
–1
ΙΙΙΙΙ
= 0.4 A
n
ϕ
–
Ø
ϕ
–
Λ
–
0
–15
–15
–15
–15
–15
1
–11.8 –11.8
–11.6
–11.6
–11.7
0.248
2
–9.2 –9.0
–9.0
–9.2
–9.1
0.25
3
–7.2 –7.2
–7.0
–7.0
–7.1
0.248
4
–5.8 –5.6
–5.4
–5.2
–5.5
0.25
5
–4.2 –4.2
–4.0
–4.0
–4.1
0.29
•
For T = 1.9 s and an average value of
Λ
= 0.257 we
obtain the damping constant:
δ
= 0.135 s
–1
ΙΙΙΙΙ
= 0.6 A
n
ϕ
–
Ø
ϕ
–
Λ
–
0
–15
–15
–15
–15
–15
1
–9.2
–9.4
–9.2 –9.2
–9.3
0.478
2
–5.4
–5.2
–5.6 –5.8
–5.5
0.525
3
–3.2
–3.2
–3.2 –3.4
–3.3
0.51
4
–1.6
–1.8
–1.8 –1.8
–1.8
0.606
5
–0.8
–0.8
–0.8 –0.8
–0.8
0.81
•
For T = 1.9 s and an average value of
Λ
= 0.5858
we obtain the damping constant:
δ
= 0.308 s
–1
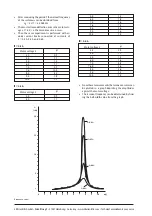
5.3 Forced rotary oscillation
•
Take a reading of the maximum deflection of the
pendulum body to determine the oscillation am-
plitude as a function of the exciter frequency or
the supply voltage.
T = 1.9 s
Motor voltage V
ϕ
3
0.8
4
1.1
5
1.2
6
1.6
7
3.3
7.6
20.0
8
16.8
9
1.6
10
1.1























































