





























XPLC108E Motion Controller User Manual V1.5
→
Specification
Item
Specification
Communication protocol
EtherCAT protocol
Valid service
CoE(PDO, SDO), FoE
Synchronization method
IO adopts input and output synchronization / DC-
distributed clock
Physical level
100BASE-TX
Duplex mode
Full duplex
Topology
linear topology
Transfer media
Cable
Transfer distance
It is less than 100M between 2 nodes
Process data
Maximum 1486 bytes of one single frame
Synchronization shaking
of two slave stations
<1us
Refresh
1000 digital input and output about is 30us, 16 servo
axes is about 100us
→
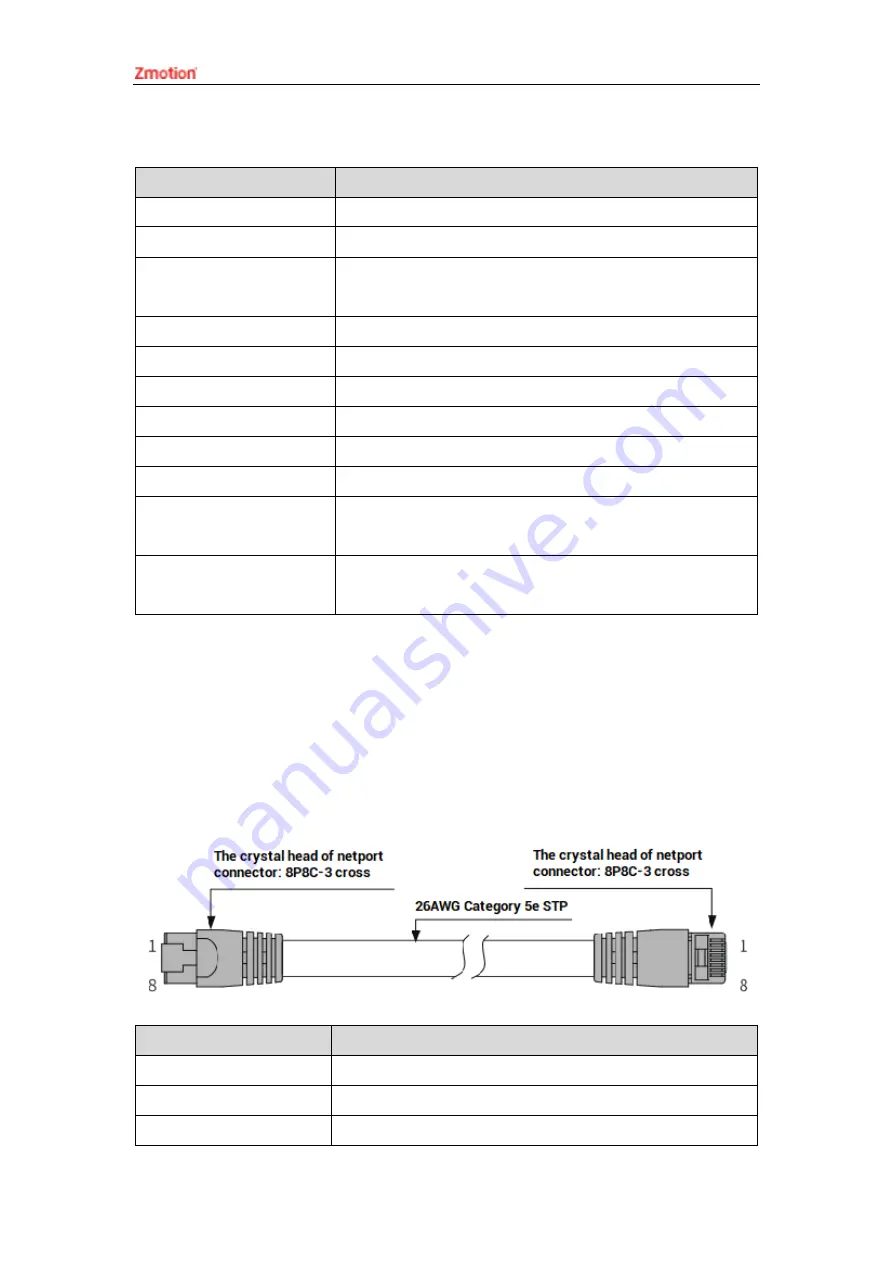
Communication Cable Requirements
Both ETHERNET communication interface and EtherCAT communication interface
adopt standard Ethernet RJ45 interface.
The network cable adopts Category 5e STP, and the crystal head has a metal shell to
reduce interference and to prevent information from being eavesdropped. As shown below:
Item
Specification
Cable type
Flexible crossover cable, Category 5e
traverse
twisted pair
Line pairs
4
Содержание XPLC108E
Страница 1: ......







































































