





























INSTALLATION AND OPERATING INSTRUCTIONS:
startZ Universal Robots
Zimmer GmbH
•
Im Salmenkopf 5
•
77866 Rheinau, Germany
•
+49 7844 9138 0
•
+49 7844 9138 80
•
www.zimmer-group.com
20
EN / 2020-11-30
DDOC01095 / 0
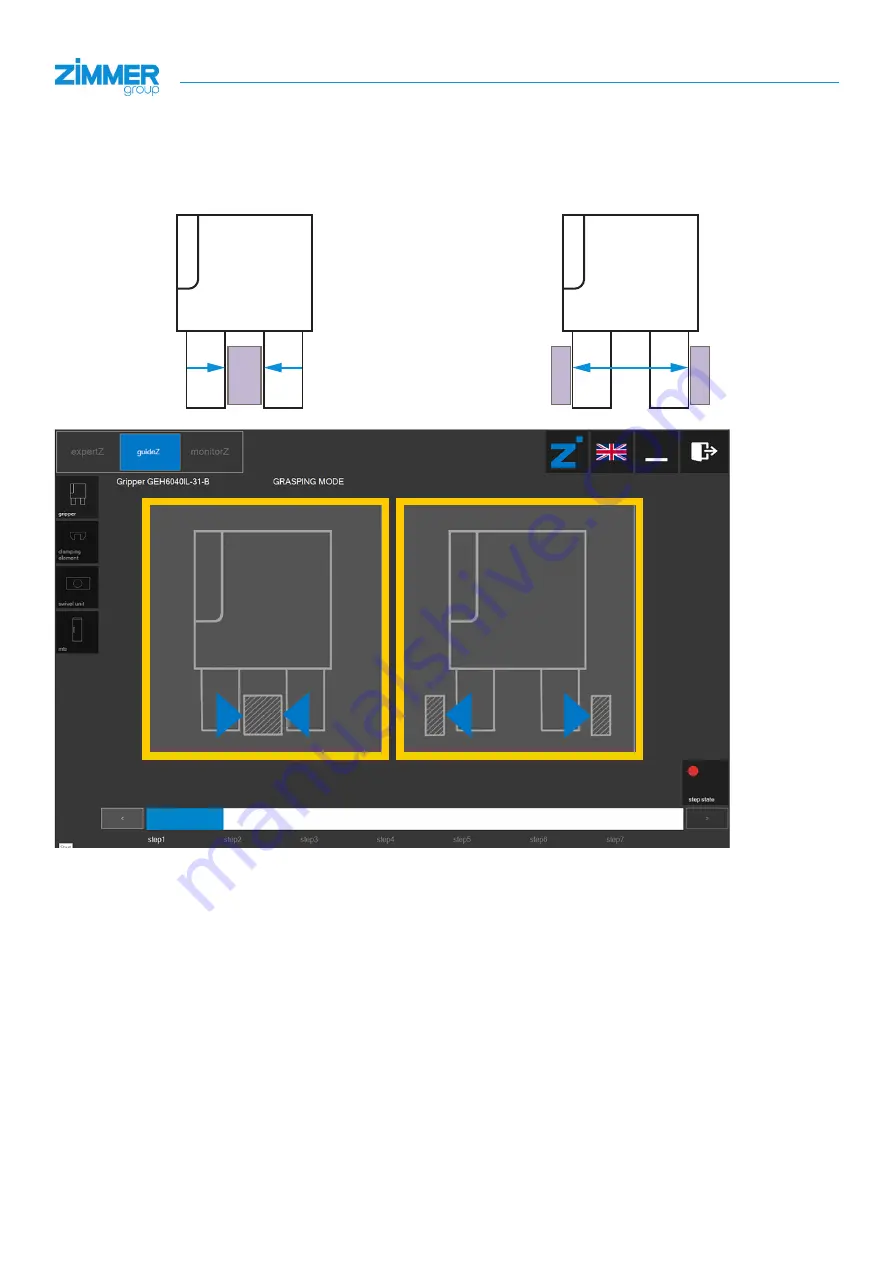
8.4 Selecting the desired gripping direction
Select the required or desired gripping direction (outside or inside gripping).
Depending on the selection, the corresponding appropriate parameters are set in the gripper automatically.
Outside gripping
Inside gripping





































































