



















ShenZhen YZ Robot Tech Co. Ltd
Page 11 / 20
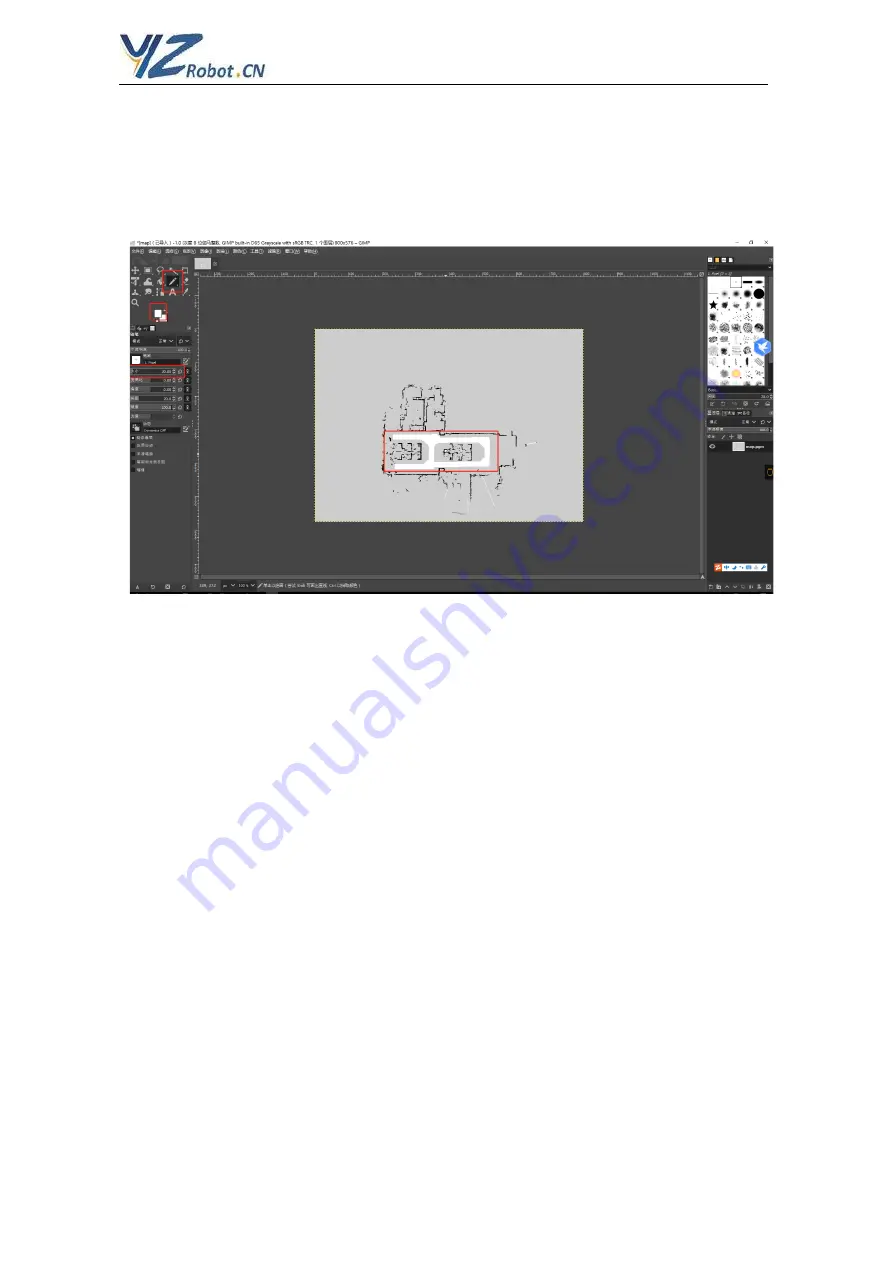
3) Select the pencil tool, select white color, brush size as appropriate. Draw out the white line path,
and the robot will only walk in the white area. It is recommended to use the shift shortcut key
to draw lines when painting lines, so that the effect is relatively smooth. As shown in following
4)Save map:
Click file export as -- click export (pay attention to the export path)
After editing, please put the new map into the robot_Under DSR, the original name is "map. pgm".
Note: White color paths/area means robot can walk here valid. no traffic area
Gray color area means robot is forbid to walk, these are invalid area for robot.
5) Power off robot
After doing above items, please power off robot main power
,
and move robot to the “Home Station”,
This “Home Station” generally is the robot charger dock station or the food counter center.
2.4.3 Setting the Home Station coordinate and all tables coordinates
:
1) Set the catering location:
After the completion of map building and map editing, the 1
st
thing is to set the
coordinate values for “Home Station”. It is necessary to manually re-write the
coordinate values in robot_dsr/install/share/rbx1_nav/launch/tb_amcl_bd.launch
file, these three re-write data are: initial_pose_x , initial_pose_y, and initial_pose_a.
(Note: you should use ftp to login the robot PC firstly, this file is stored in robot PC.)





















































