





























4.3 Main Commands
4-23
4
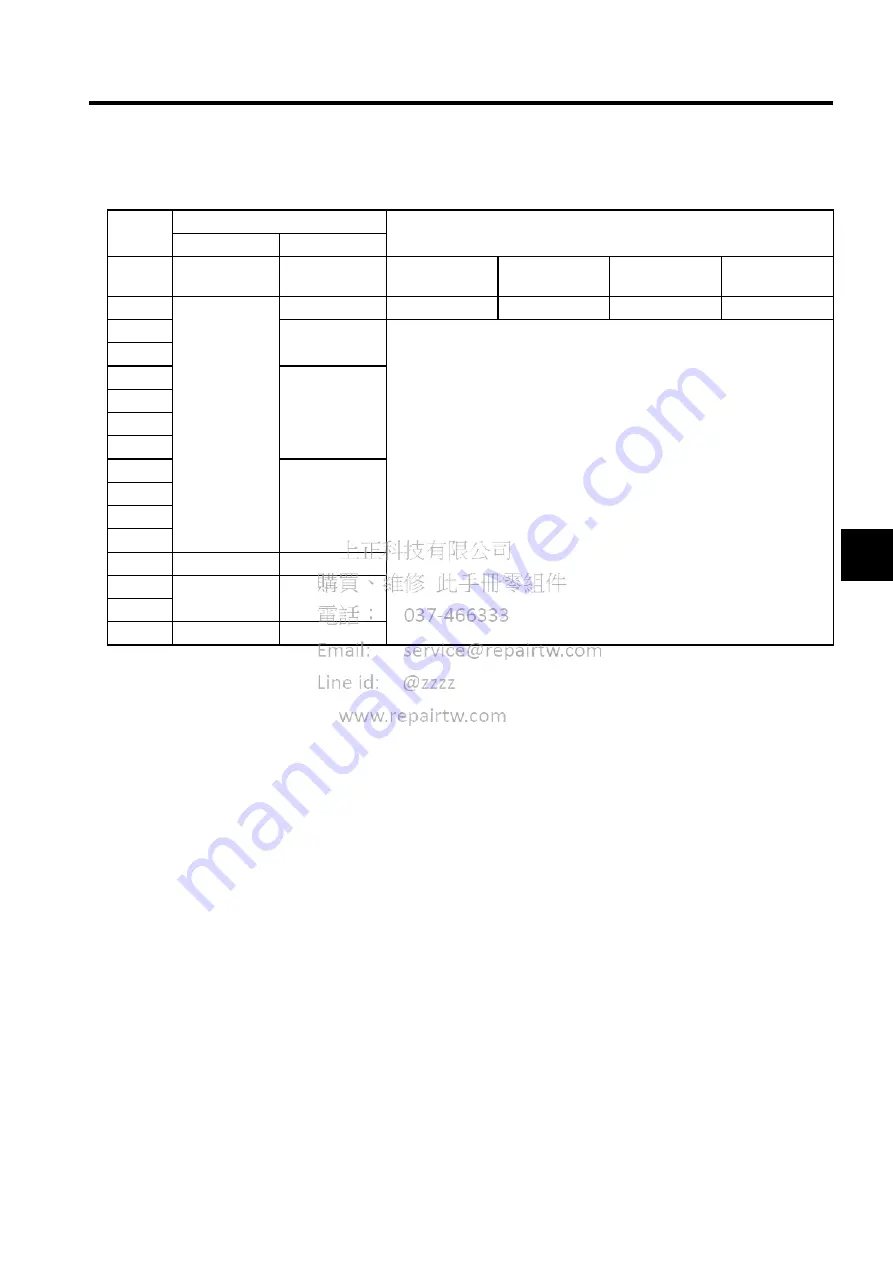
4.3.16
Turn Sensor ON (SENS_ON: 23H):
Byte
SENS_ON
Description
Command
Response
1
23H
23H
Processing
classifications
Control com-
mand group
Synchronization
classifications
Asynchronous
2
ALARM
Processing time
Within 2 sec
Subcommand
Cannot be used.
3
STATUS
• Obtains the initial position data when an absolute encoder is used.
• Position data is received from the encoder and the current position is created.
• The reference point, zero point (ZPOINT), and software limits will be enabled
when an absolute encoder is used.
• Can be used during phases 2 and 3.
• If an incremental encoder is being used, the command will be ignored.
• During phase 1, a MECHATROLINK-II command warning (A.95) will occur
and the command will be ignored.
4
5
MONITOR 1
6
7
8
9
MONITOR 2
10
11
12
13
SEL_MON 1/2
SEL_MON 1/2
14
IO_MON
15
16
WDT
RWDT





















































