





























PRG: 1015 and earlier: 1000 to 32000 Hz
<5> When set for sourcing, +5 V/1.5 k
Ω
or higher, +8 V/3.5 k
Ω
or higher, +10 V/10 k
Ω
or higher. When set for sinking, the external power supply
should be +12 Vdc, ±5% with 16 mA or less.
Note:
Cycle power to the drive to enable MEMOBUS/Modbus settings.
u
L: Protection Function
L parameters provide protection to the drive and motor, such as: control during momentary power loss, Stall Prevention,
frequency detection, fault restarts, overtorque detection, torque limits and other types of hardware protection.
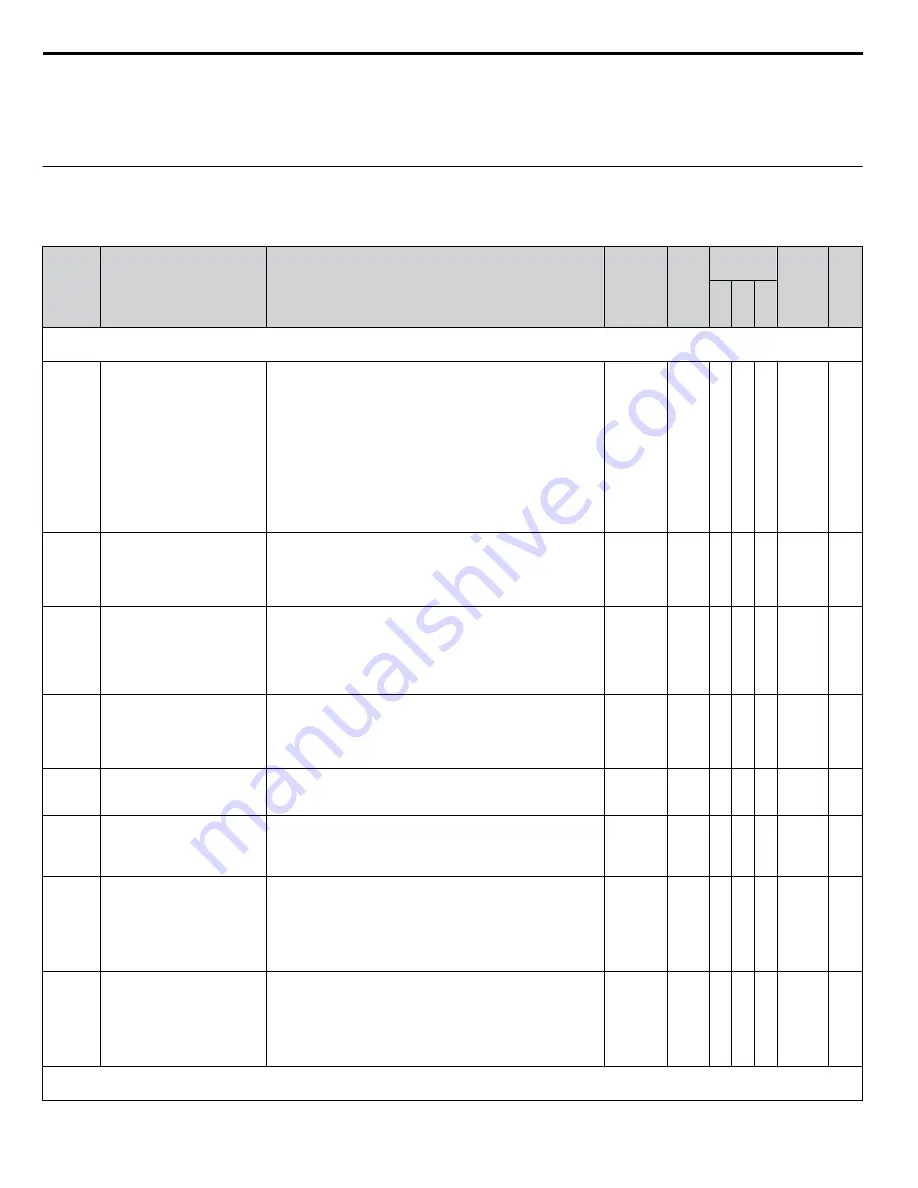
No.
Name
Description
Range
Def.
Control
Mode
Addr.
Hex
Pg.
V/
f
O
L
V
P
M
L1: Motor Protection Functions
Use L1 parameters to configure motor protective functions.
L1-01
Motor Overload Protection
Selection
Sets the motor thermal overload protection (oL1) based on the
cooling capacity of the motor.
0: Disabled
1: General Purpose Motor (Standard Fan Cooled)
2: Drive Dedicated Motor with a Speed Range of 1:10
3: Vector Motor with a Speed Range of 1:100
4: PM Motor with Variable Torque
6: General Purpose Motor (50 Hz)
<1>
Note:
When using multiple motors the drive may not be able
to provide protection, even if overload is enabled in L1-01. Set
L1-01 to 0 and ensure each motor has separate thermal relays
installed.
0 to 4; 6
1
<2>
S
S
S
480
L1-02
Motor Overload Protection
Time
Sets the motor thermal overload protection (oL1) time.
A larger L1-02 time will increase the time for an oL1 fault to
occur.
This parameter does not typically require adjustment. Should
be set in accordance with the overload tolerance of the motor.
0.1 to 20.0
8.0
min
A A A
481
L1-03
Motor Overheat Alarm
Operation Selection (PTC
input)
Sets operation when the motor temperature analog input
(H3-02/10 = E) exceeds the oH3 alarm level.
0: Ramp to Stop
1: Coast to Stop
2: Fast-stop using C1-09
3: Alarm Only (“oH3” will flash)
0 to 3
3
A A A
482
L1-04
Motor Overheat Fault
Operation Selection (PTC
input)
Sets stopping method when the motor temperature analog
input (H3-02/10 = E) exceeds the oH4 fault level.
0: Ramp to Stop
1: Coast to Stop
2: Fast-stop
0 to 2
1
A A A
483
L1-05
Motor Temperature Input
Filter Time (PTC input)
This parameter adjusts the filter on the motor temperature
analog input (H3-02 or H3-10 = E). Increase to add stability,
decrease to improve response.
0.00 to
10.00
0.20 s A A A
484
L1-13
Continuous Electrothermal
Operation Selection
Determines whether or not to hold the electrothermal value
when the power supply is interrupted.
0: Disabled
1: Enabled
0, 1
1
A A A
46D
L1-22
<16> <17>
Leakage Current Filter Time
Constant 1
Sets the time constant for reducing the sensitivity level when
detecting leakage current. Set in seconds and used when
operating at constant speed.
Note:
This parameter is available only when C6-02 is
set to B. To display this parameter, first set
C6-02 = B.
0.0 to 60.0 20.0 s A A A
768
L1-23
<16> <17>
Leakage Current Filter Time
Constant 2
Sets the time constant for reducing the sensitivity level when
detecting leakage current. Set in seconds and used during
acceleration and deceleration operation.
Note:
This parameter is available only when C6-02 is
set to B. To display this parameter, first set
C6-02 = B.
0.0 to 60.0 1.0 s A A A
769
L2: Momentary Power Loss
Use L2 parameters to configure drive functions for momentary power loss conditions.
B.2 Parameter Table
384
YASKAWA ELECTRIC SIEP C710606 18F YASKAWA AC Drive – V1000 Technical Manual







































































