


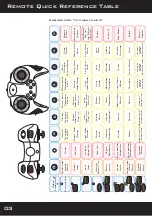












Controller overview
Walking
05
Q: What’s the difference between the various walking gaits?
A: In addition to 6 turning moves (walk-turns and turn-in-place)
your Robosapien™V2 has 5 different walking gaits. These can
be selected by pressing the GAIT CHANGE button “y” when he’s
walking forward from a single “left-joystick” press.
GAIT 1: (press left joystick once) Walks forward, sways at the
hip.
GAIT 2: (press left joystick twice) Double pace. First few steps in
place to gain momentum.
GAIT 3: (one “y” press) Same pace, twists hands at the wrist,
alternately.
GAIT 4: (two “y” presses) Swings arms alternately, hands turned
sideways.
GAIT 5: (three “y” presses) Sways twisting and bending at the hip,
hands palm down.
Q: How do I keep my robot from stumbling on carpet?
A: From a STOP, press his LEFT joystick FORWARD twice. This
will get him into a high-stepping gait which will help him over
shag, forward or backward. If he does fall over on his back
though, just press SHIFT3-STOP to get him back up again.
Q: How do I keep my robot from falling when he turns in place on
carpet?
A: When his batteries are fresh, he will sometimes topple when
left to turn continuously on carpet. Turn him only as far as
needed, then stop or change to forward walk command.







































































