





























Page 66
M4220170607EN
UI Robot Technology Co. Ltd.
UIM2842
6.
CUR
η Motor Current Adjusting
Format:
CUR
;
Description:
Set the output phase current to
.
= 0,1,
…
,80 (unsigned integer)
0…80 represent 0…8.0 amps.
ACK:
AA [Controller ID] [ASB] [CUR] [V0] [V1] [V2] [P0] [P1] [P2] [P3] [P4] FF
Comment:
[ASB]
>> Received data 0
[CUR]
>> Received data 1
[V0] ~ [P4]
>> Received data 2 ~ 9
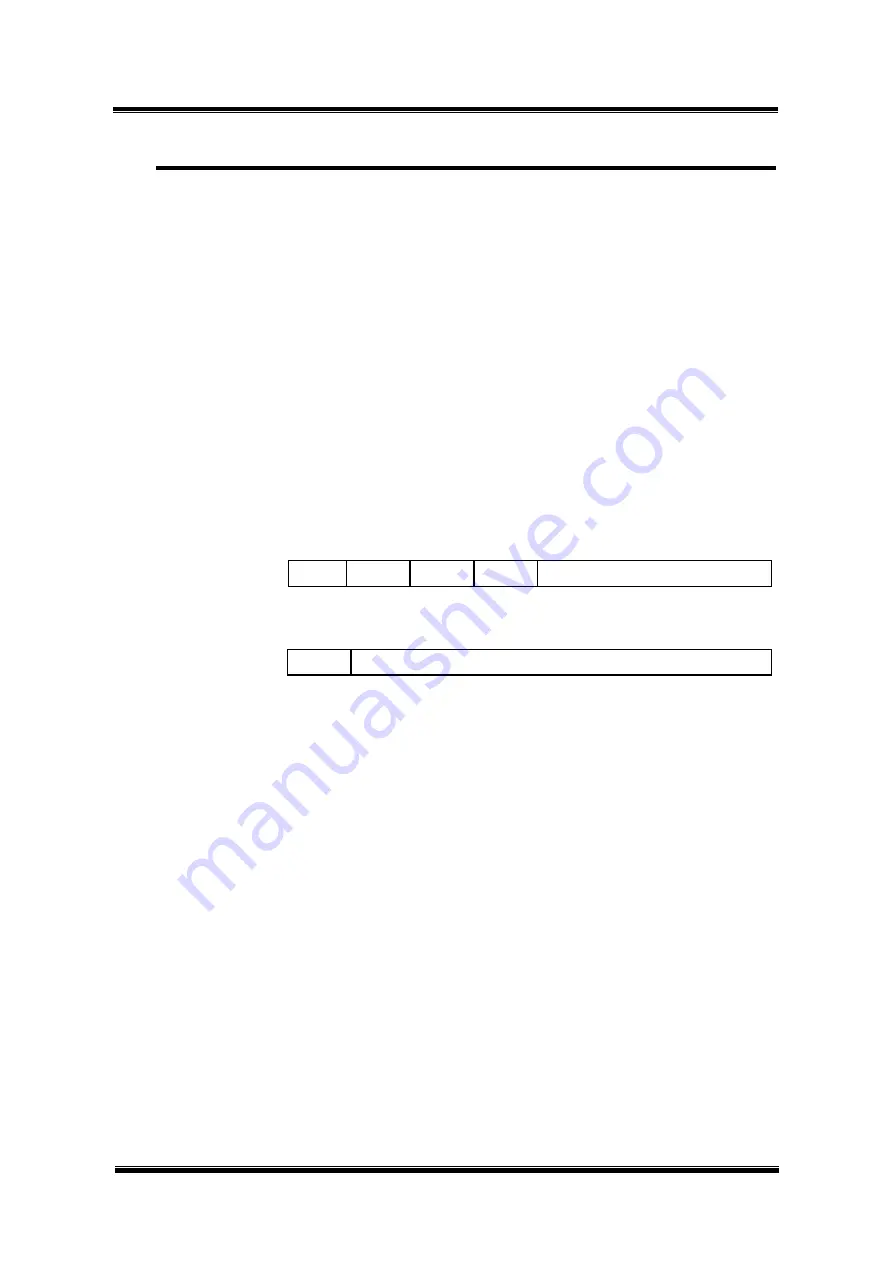
[ASB] structure:
Bit
7
6
5
4
3
2
1
0
Value
N/A(=0)
ACR
ENA / OFF
DIR
MCS – 1(
0 = full step
,
15 = 1/16 step
)
[CUR] structure:
Bit
7
6
5
4
3
2
1
0
Value
N/A(=0)
Phase Current (e.g. 27 = 2.7 Amp)
[V0] ~ [V2] is the converted value for desired speed (16 bits) (Figure 12-
1)
[P0] ~ [P4] is the converted value for
desired displacement (32 bits)
(Figure 12-2)
Note:
Value of this instruction will be stored in EEPROM.
If the received current value is not one of the above integers, an Error
ACK will be sent to the user device through RS232.
Incorrect instructions
will be discarded without being executed.







































































