




























(1) Gimbal
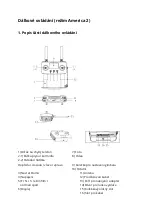
prohledává vyhledávání přistávací plochy dronu [H], požadavky na přistávací
plochu: 1 ostrý kontrast, 2 bílé nápisy „H“, 3 přistávací plocha bez překážek.
(2) Dron se nejprve natočí na horní část odbavovací plochy a uzamkne odbavovací
plochu, poté po úspěšném rozpoznání hladce sestoupí. Při přistání z výšky menší než 3
metry se náklon/naklopení dronu obnoví do normálního pohledu a již nebude upravovat
polohu dronu a přistane přímo. Pokud je zjištěna chyba nebo nastanou jiné
neočekávané okolnosti, ukončete funkci stisknutím tlačítka Stop.
(3) Pokud nebyla nalezena přistávací plocha nebo při kritickém vybití baterie, když již
přistál do výšky 5 metrů, dron přistane přímo.
(4) Vyhledání funkce přistávací plochy nelze provést v režimu videa.
(5) Pokud to není nutné, vypněte to v nastavení.
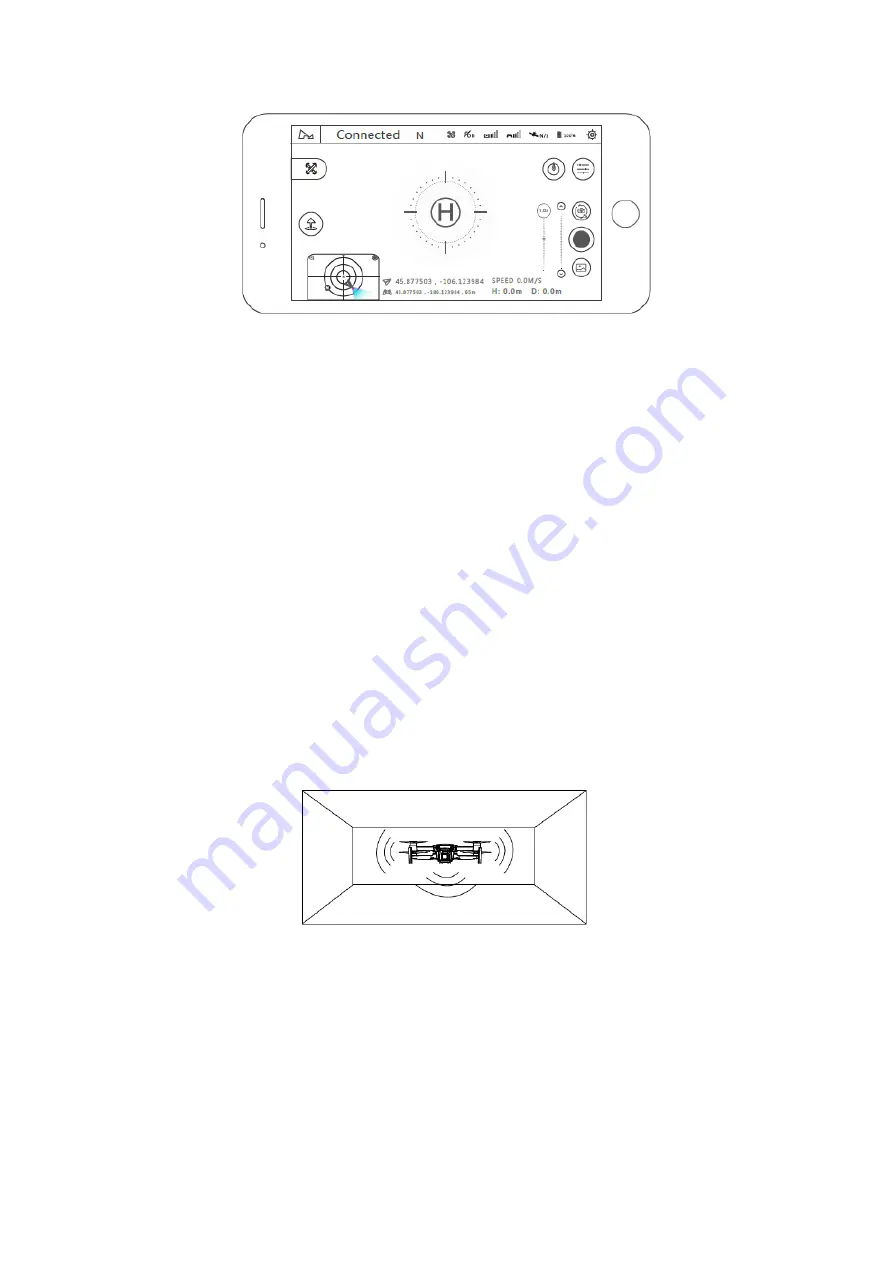
5. Optický polohovací systém Vision
Dron je vybaven optickým polohovacím systémem pro optické vidění dolů, který se
skládá z kamery pro výhled dolů a senzoru TOF (doba letu), aby se dron mohl stabilně
vznášet v nízkých nadmořských výškách bez GPS nebo při slabých GPS signálech.
POZNÁMKY:
(
1) Systém Vision pracuje nejlépe s odpovídajícím osvětlením a jasně označenými nebo
texturovanými překážkami. Není navržen tak, aby nahradil ovládání a úsudek pilota,
věnujte pozornost dronu a tipům v aplikaci HUBSAN a nespoléhejte na systém Visual.
(
2) Kamerový systém nelze běžně používat ve scénách, kde je okolní světlo příliš jasné,
příliš tmavé, zrcadlové, vodní, reflexní, řídce strukturované atd.

































































