




























EVK-IRIS-W10 - User guide
UBX-23007837 - R03
Hardware description
Page 22 of 43
C1-Public
IRIS-W10 pin name
IRIS-W10 function
Resistor/Jumper enable
Interface IC function
B14
GPIO6/JTAG-TCK
R1/J15
FTDI-JTAG-TCK, Pin 16,
U108
B12
GPIO8/JTAG-TDI
R3/J36
FTDI-
JTAG-TDI, Pin 17, U108
A12
GPIO9/JTAG-TDO
R4/J34
FTDI-
JTAG-TDO, Pin 18, U108
A14
GPIO7/JTAG-TMS
R5/J35
FTDI-
JTAG-TMS Pin 19, U108
B11
GPIO10/JTAG-RESETn
R6/J37
FTDI-
JTAG-RESETn, Pin 22, U108
-
JTAG-Bootn
R7
FTDI-
Pin 23
,
U108
M9
GPIO 4/SPI-CLK
R8
FTDI-SPI-CLK,
Pin 26, U108
M10
GPIO 2/SPI-MOSI
R9
FTDI-SPI-MOSI,
Pin 27, U108
N10
GPIO 3/SPI-MISO
R37
FTDI-SPI-MISO,
Pin 28, U108
M11
GPIO 0/SPI-CS
R38
FTDI-SPI-CS,
Pin 29, U108
N11
GPIO 1/SPI-WP
R41
FTDI-SPI-WP,
Pin 30, U108
M2
GPIO 21/SPI-HD
R42
FTDI-SPI-HD,
Pin 32, U108
A10
GPIO 26/UART-TXD
R52
FTDI-UART-RXD, Pin 39, U108, Pin 17, U109
B9
GPIO 24/UART-RXD
R53
FTDI-UART-TXD, Pin 38, U108, Pin 1, U109
B8
GPIO 19/UART-RTS
R54
FTDI-UART-RTS, Pin 40, U108, Pin 19, U109
A9
GPIO 20/UART-CTS
R55
FTDI-UART-CTS, Pin41, U108, Pin 6, U109
A11
GPIO 11/UART-DTR
R56
FTDI-UART-DTR, Pin 43, U108, Pin 18, U109
B10
GPIO 12/UART-DSR
R57
FTDI-UART-DSR, Pin 44, U108, Pin 4, U109
-
-
R58
Pin 48, U108
-
-
R59
Pin 52, U108
-
-
R60
Pin 53, U108
-
-
R61
Pin 54, U108
-
-
R63
Pin 55, U108
-
-
R64
Pin 57, U108
-
-
R65
Pin 58, U108
-
-
R66
Pin 59, U108
Table 8: Main COM port connections
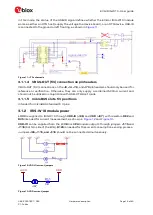
UART3 clock signal from IRIS-W10 pin
F3,
GPIO 25
is multiplexed by RMII clock signal.
R282/R279
are
intended to
demultiplex the two signals
R279
is populated by default and
connects to
RMII clock, by disconnecting
R279
and populating
R282
with
0R, GPIO25
will be
connected to pin
8
on header
J48.
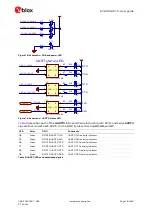
3.6
JTAG/SWD debug interfaces
There are two interfaces for debugging IRIS-W10 either
JTAG
or
SWD
. When powering up or
resetting the EVK-IRIS-W10, the status of the
RF-Control
strapping pins defines the active
RF-CNTRL
SWD
JTAG
GPIOs
RF-CNTL0
F
F
F
RF-CNTL1
F
F
F
RF-CNTL2
0
F
F
RF-CNTL3
F
F
0
Table 9: RF-CTRL strap-in (F=Float)
SW8
is used to set the RF-CNTL signals to the desired status as shown in
. An
external target hardware can be attached to the
J20
header connector for firmware
programming and debug.
J20
is implemented with a 2x5 header with 1.27 mm pitch.