












TMCM-160 Manual (V1.11 / August 8th, 2007)
12
Copyright © 2006, TRINAMIC Motion Control GmbH & Co. KG
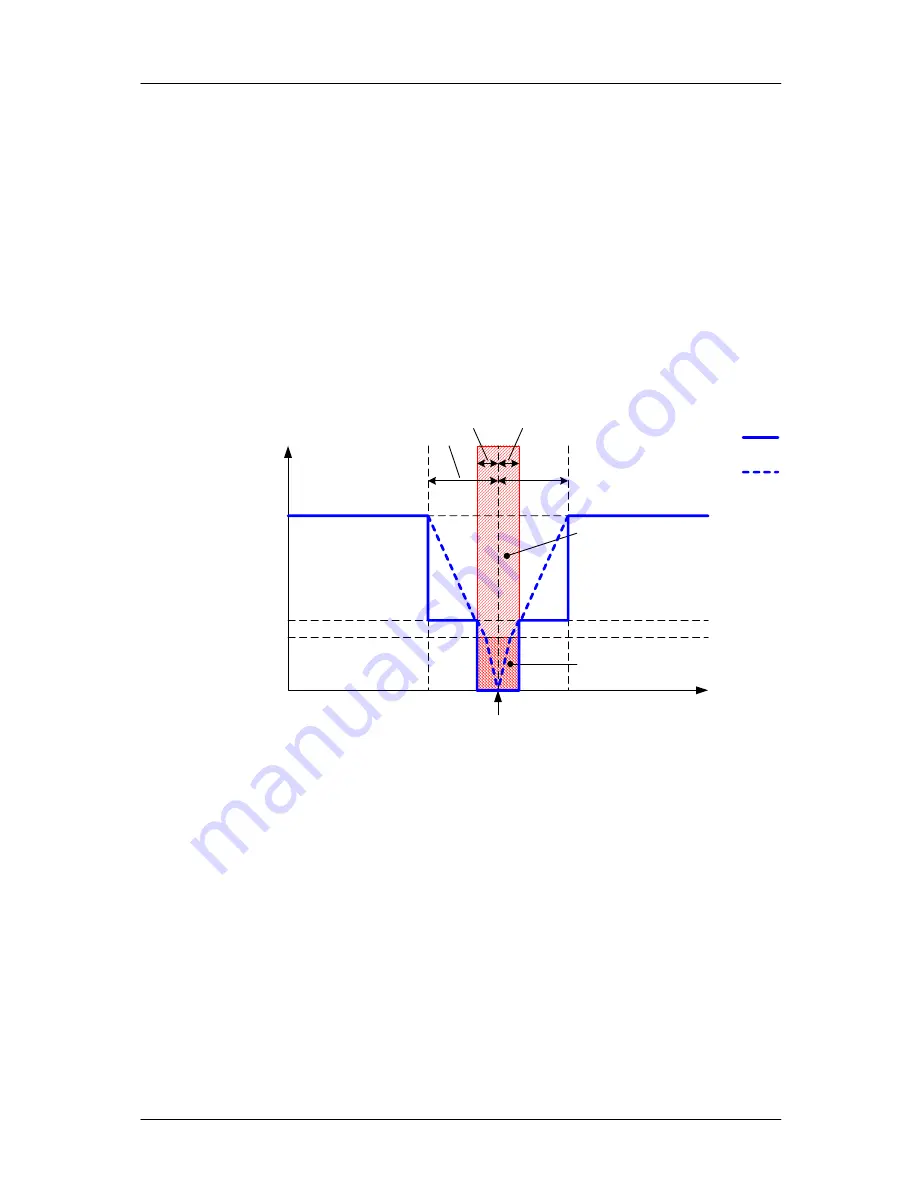
5.9 Parameterizing the positioning algorithm
The module supports a positioning based on the motor’s hall sensor information. Please refer to the
schematic for the required set of parameters.
You can optimize the parameter set in your application to get a good positioning accuracy and a fast
positioning speed:
1. Select the maximum positioning speed as desired
2. Choose a minimum positioning speed, that allows a fast stop of the motor
3. Set the MVP_slow_down_distance in a way, that the motor slows down to the min_pos_speed in
this area (dotted line)
4. Choose the active brake velocity as allowable for your application
5. Set MVP_target_reached_distance to the value, which gives a stop as near as possible to the
target position
|velocity|
position
target position
(set via MVP)
max_pos_speed
min_pos_speed
MVP_target_reached_distance
Motor off in this area
active_brake_velocity
Motor braked in this
area if hard_stop_flag
set
MVP_slow_down_distance
Velocity enforced by
PID regulator
velocity enforced by
PID regulator
actual motor velocity
Figure 5.2: Parameterizing the positioning algorithm
5.10 Restoring factory default settings
The module stores user settings in an on-board EEPROM. You can restore the factory values, by setting
and storing a 255 to the current limit parameter. Upon next power on, all EEPROM values are loaded
with the default settings. However, this also clears the temperature measurement calibration, which
should be recalibrated before operating the device near its temperature limits.





















































